







Robots are rapidly coming into the picture by working in space, mines, hospitals, military, search and rescue operations etc. All terrain mobile robots is a new project and for this, many mechanisms can be developed, existing ones can be optimized to reduce cost and enhance performance.
A very important part, that is, base of mobile robots which moves the robot has been developed. It can be useful in agricultural industry, search and rescue missions during disasters and segregating garbage in landfill sites.
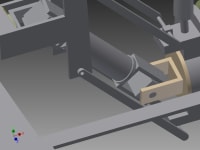
The vehicle has 5 wheels arranged as on vertex of pentagon. Five wheels are can easily be toppled in order to rotate. Revolution of wheels about axis of pentagon is controlled by parent motor.
Parent motor:
It is driving steering knuckle joint.
Child motor:
It is driving small wheel.
Copper slots:
Revolving motors are controlled from signals received from static copper slots through brush.
Say stepper mottors are used, each motor requires 4 ports, so 5 motors in a wheels requires 5x4=20 ports. Therefore 20 copper slots are made. The copper slots are attached to main frame which has the micro-controller and they are static.
Small wheel:
Diameter = 14cm
Spokes are having L shape cross section, which increases strength.
Double wishbone:
Wishbone are connected to steering knuckle as revolute joints instead of typical ball joints because of differential steering, by controlling angular velocity of parent motor, instead of Ackermann steering. Also, in this case design is simplified.
Wires:
Wires are coming from static copper slots to main frame.
Steering knuckle joint: It is similar joint to one in cars.
Suspension: It is similar to MacPherson strut.
Video
Voting
-
ABOUT THE ENTRANT
- Name:Mridul Gandhi
- Type of entry:individual
- Profession:
- Number of times previously entering contest:never
- Mridul is inspired by:I believe engineering is the best thing that has ever happened for the sake of humanity. It is application of science and mathematics which liberates humans and helps to understand universe and its laws. With this understanding engineers make things which help everyone fulfill their aims. Engineers also study the impacts of technology and are working to improve them.
I like spending my free time thinking and conceptualizing product which involves mechanisms, electronic components and GUI. I play with similar concepts, compare them and form a new assembly of ideas. It does not matter what field of study it is, but going into the basic level of understanding and conceptualizing is always fun. So I have been working on inter-disciplinary subjects which paved the way for my interest in robotics. My objectives are not transitory but ambitious to hugely impact society while using a minimalist approach. - Software used for this entry:Autodesk Inventor 2015 Pro (student), Coppelia Robotics V-REP pro edu V3.3.1
- Patent status:none