









Revolutionizing Underwater Exploration: The RDB55 Brushless Thruster
The underwater world holds a wealth of secrets, beckoning us to explore its depths. However, this exploration hinges on reliable and efficient technology. For too long, Remotely Operated Vehicles (ROVs) have relied on thruster technology that sees only incremental improvements. The RDB55 Brushless Thruster disrupts this stagnation, offering a paradigm shift in underwater propulsion.
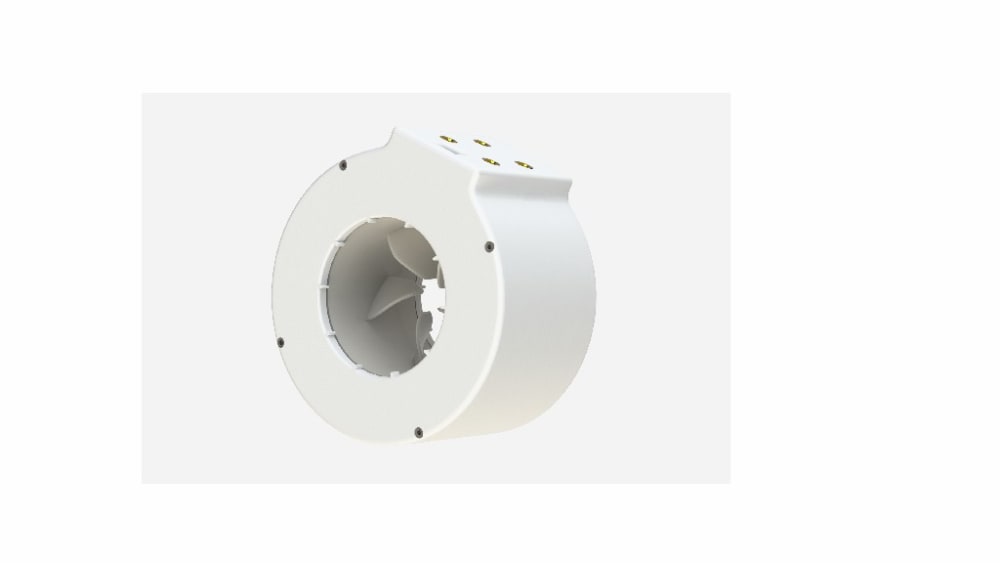
The RDB55 stands out due to its innovative hub-less design. Unlike traditional thrusters with a central axis connecting blades to a motor, the RDB55 eliminates this entirely. Instead, the motor rotor itself acts as the propeller, encased in a rim-driven housing. This ingenious design boasts several advantages. Firstly, efficiency is increased by eliminating the drag associated with a central axis. This streamlined design allows for a more direct transfer of motor power to water propulsion. Secondly, the hub-less design translates to quieter operation, minimizing environmental impact. Furthermore, the RDB55 prioritizes safety for marine life. The design inherently channels water flow through the thruster body, preventing debris and kelp from tangling and causing damage.
Beyond its core functionality, the RDB55 boasts several other noteworthy features. The thruster was originally envisioned for 3D printing, allowing for on-demand production and customization. This flexibility is further enhanced by an injectable design format. This opens the door to manufacturing thrusters from biodegradable materials, a boon for sensitive underwater environments. The RDB55 represents a significant cost reduction as well. Fewer parts translate to lower manufacturing costs, while the design minimizes maintenance requirements. These factors combine to deliver a highly competitive thruster solution.
The ROV industry stands to gain immensely from the adoption of the RDB55. ROVs play a crucial role in various underwater applications, including scientific research, resource exploration, infrastructure maintenance, and search and rescue operations. The RDB55's superior efficiency, quiet operation, and environmental safety make it ideal for these diverse tasks. Furthermore, the thruster's scalability allows for integration into a wide range of ROV designs, from small inspection vehicles to large workhorse platforms.
Winning this competition would be a major win for the RDB55, accelerating its path to widespread adoption. The recognition and validation from the competition would attract potential partners and investors, enabling mass production and global distribution. This, in turn, would lead to lower costs for end users, further democratizing access to this transformative technology. The RDB55: A game-changer for underwater exploration. Winning this competition will propel it forward, unlocking a new era of discovery in the depths below.
Video
-
Awards
-
 2024 Automotive/Transportation Honorable Mention
2024 Automotive/Transportation Honorable Mention -
 2024 Top 100 Entries
2024 Top 100 Entries
Like this entry?
-
About the Entrant
- Name:Mohamed Keshk
- Type of entry:individual
- Patent status:none