A novel control law prevents sinusoidal free response ringing caused by energization transients in an underdamped dynamic system. Designs need no longer endure deleterious ringing. Vintage control law techniques or computerized trial-and-error only partially suppresses ringing. In complete contrast, the novel control law predictively matches a closed form continuous forcing function throughout the intended transient duration to prevent ringing. That is, the novel control law addresses the cause of ringing instead of masking it or guessing.
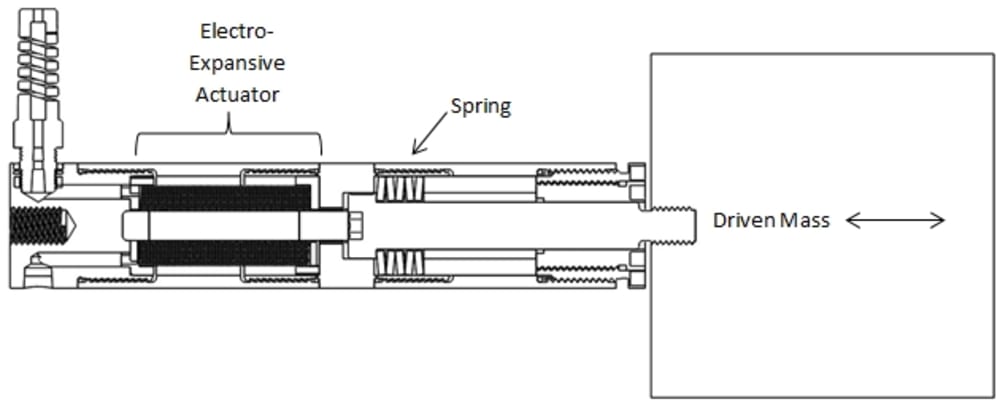
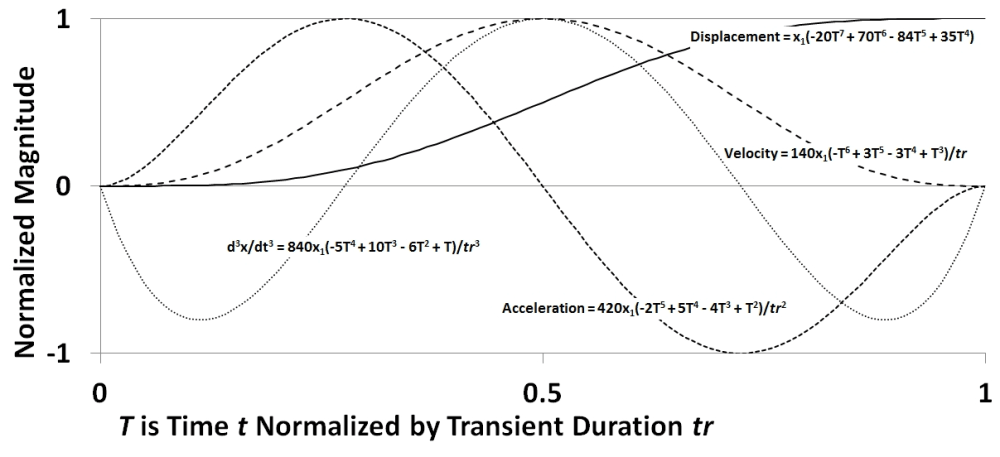
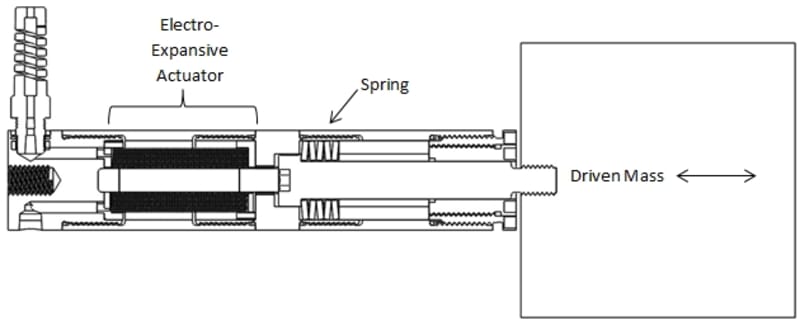
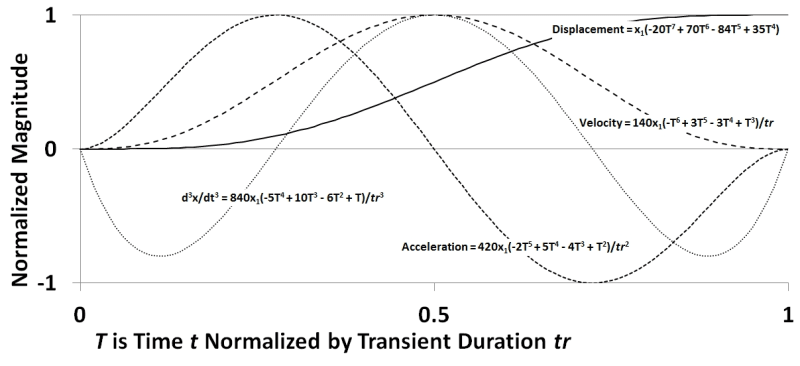
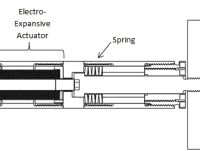
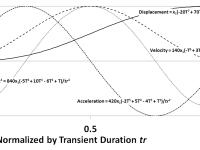
The novel control law uses polynomials to implement the Bright principle of modeling all energy components within a particular dynamic system that is to operate in a specific way. A model of a two-port (energy in and out) test actuator, Figure 1, yielded both a non-ringing transient forcing function quickly followed by a deliberately ringing transient forcing function. In these solved cases, the two components of input electrical energy are voltage and charge and the two components of output mechanical energy are force and distance. Boundary conditions set the absence or presence of ringing as desired for independent energy component distance, which fixes polynomial order. (Figure 2 plots a non-ringing distance transient and its derivatives. Compare with sinusoids.) Using the two solved forcing functions open loop; test data proved the absence quickly followed by the deliberate presence of ringing.
Featuring the Bright principle, the novel control law offers precise control over the entry and exit of energy into a dynamic system. To begin benefitting, existing controllers may only require a software update since the novel control law is mathematical in nature.
The novel control law imposes no limit on transient duration. That is, there need be no delay between successive transients, a transient can match the system free response time without ringing, and it has no speed limit. Speed limits stem from the dynamic system itself.
Application is widespread. Whole classes of devices employing pulse width modulation such as digital communications and variable frequency AC motor drives will benefit. Calculating forcing function transients of any duration that do not excite the free response is straightforward.
An entire host of other dynamic system classes that could benefit includes, for example, motion controllers, imaging devices, and fluid systems. Printing electronic components benefits by reducing or perhaps eliminating printer-positioning delays caused by ringing. Pulses that are more precise improve pulse-echo image resolution. Better valve control avoids fluid system water hammer and valve element impact upon closing.
Predicted benefits to the user of this novel control law include further physical insight into dynamic system design and operation. With such insight, designs can improve size, mass, heat loss, cost, noise, vibration, and so forth. Desired material property improvements will emerge. Adjusting the forcing function from operational feedback reduces maintenance.
In summary, this novel control law solves long-standing problems created by free response excitation. Significant worldwide technical, economic, and quality of life benefits are expected. Seminars to train engineers would transfer the Bright principle and solution techniques for them to implement.
Patents pending.
Like this entry?
-
About the Entrant
- Name:Charlie Bright
- Type of entry:individual
- Patent status:pending