
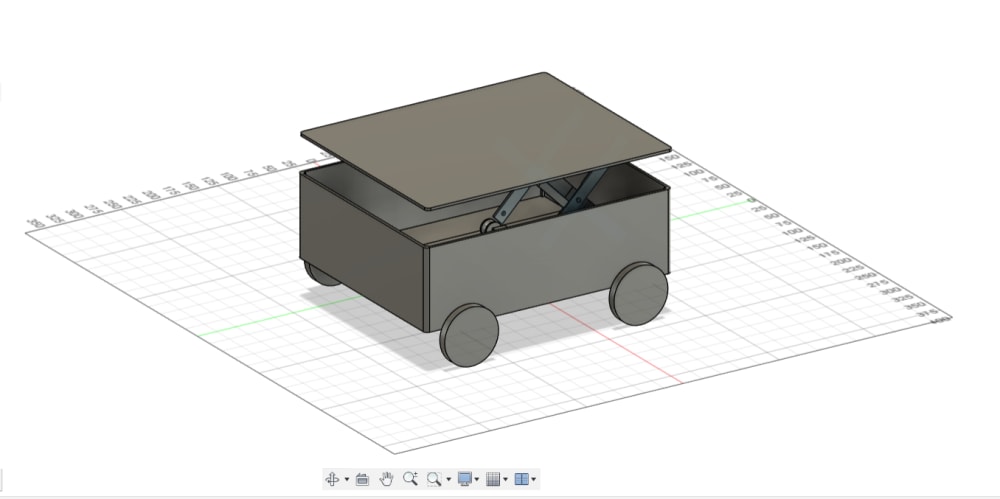






AutoMech Rover is a prototype autonomous material handling robot developed to address the challenges of manual labor in small-scale warehouses and industries. While large enterprises use costly Automated Guided Vehicles (AGVs) and Autonomous Mobile Robots (AMRs), such systems are not feasible for smaller setups. Our solution provides a low-cost, compact, and accessible alternative to bring intelligent automation into these environments. The current prototype is designed to navigate predefined paths using IR sensors, detect junctions, and reach designated pickup stations. It features a 3D-printed scissor-lifting mechanism, designed in CAD and optimized for lightweight functionality. Once at the station, the robot lifts a storage bin, follows its return path, and safely drops the load at a specified location.
The system is powered by an Arduino UNO microcontroller, which manages sensor inputs, motion control, and lift operation. The robot currently operates in autonomous mode and demonstrates key capabilities such as line following, lifting, and placement. Our future development plan involves building a full-scale product version capable of handling payloads up to 80 kg. It will feature an inductive wire tracking system for more precise navigation, a radio frequency (RF) based control system, and integration with a mobile/desktop application to allow centralized task control and monitoring of multiple robots.
Video
Like this entry?
-
About the Entrant
- Name:Omkar Hugewar
- Type of entry:teamTeam members:
- Prasanna Ighe
- Anuja Pawar
- Preeti Jadhav
- Neha Patil
- Software used for this entry:fusion 360 CAD softwar for design, aurduino microcontroller and blutooth connector app, cura ultimaker for 3d printing,
- Patent status:none