

This submission presents practical Hyperloop / evacuated tube transport pod engineered for high-speed, near-vacuum transportation, with feasible design solutions across propulsion, levitation, control, power, and structural subsystems. It represents a significant advancement over conventional ground-based transit systems by eliminating friction, minimizing energy losses, and integrating fail-safe autonomous features in a scalable, manufacturable framework.
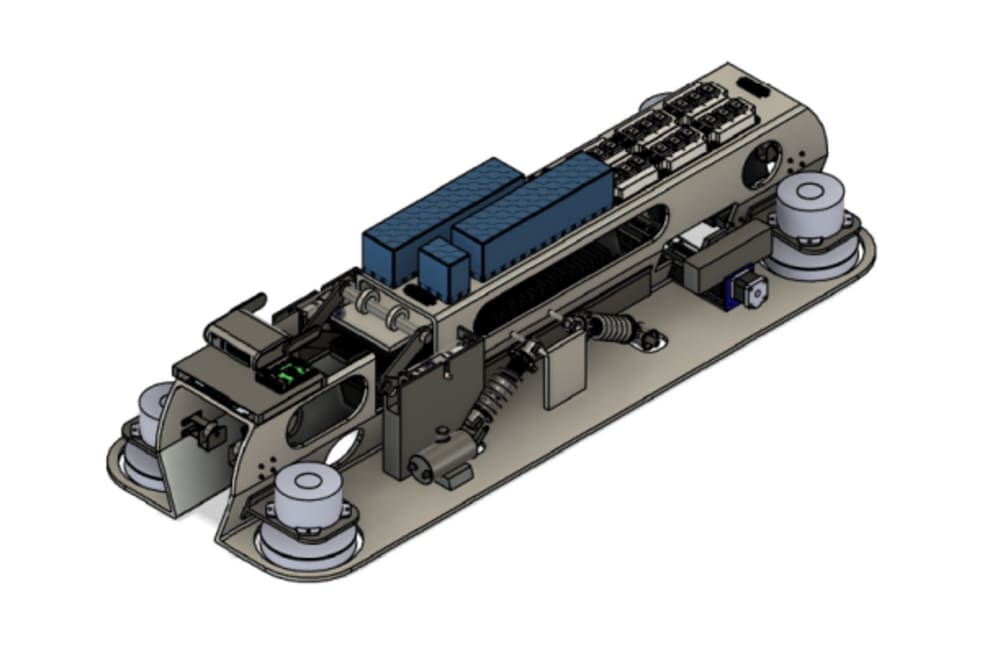
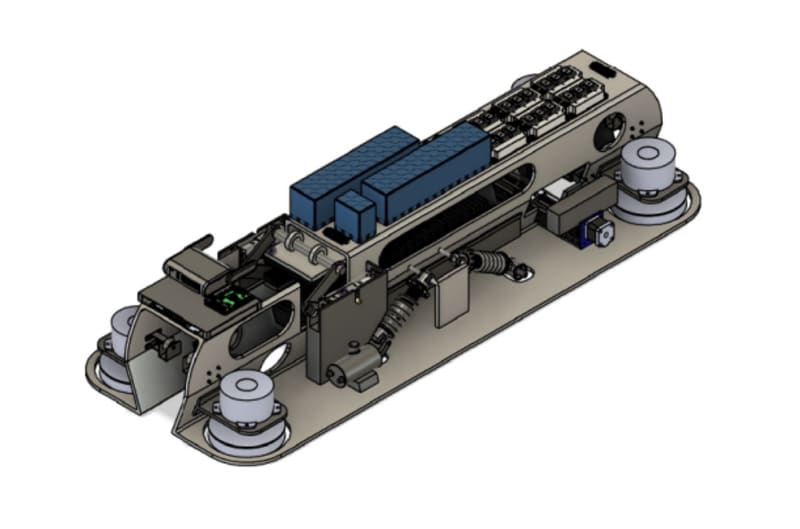
The propulsion system uses a custom-designed Double Linear Induction Motor (DLIM) with 24-slot, 2-pole, 3-phase architecture mounted on either side of a paramagnetic aluminium track. It generates 43 N of thrust via contactless electromagnetic induction, reaching 6.88 m/s in 20 seconds. The design’s novelty lies in its symmetric LIM layout, which induces magnetic field coupling across the track, enhancing directional confinement and stability—features absent in single-sided LIM systems. Integrated permanent-magnet eddy current braking and pneumatic emergency systems enable contactless, low-wear deceleration.
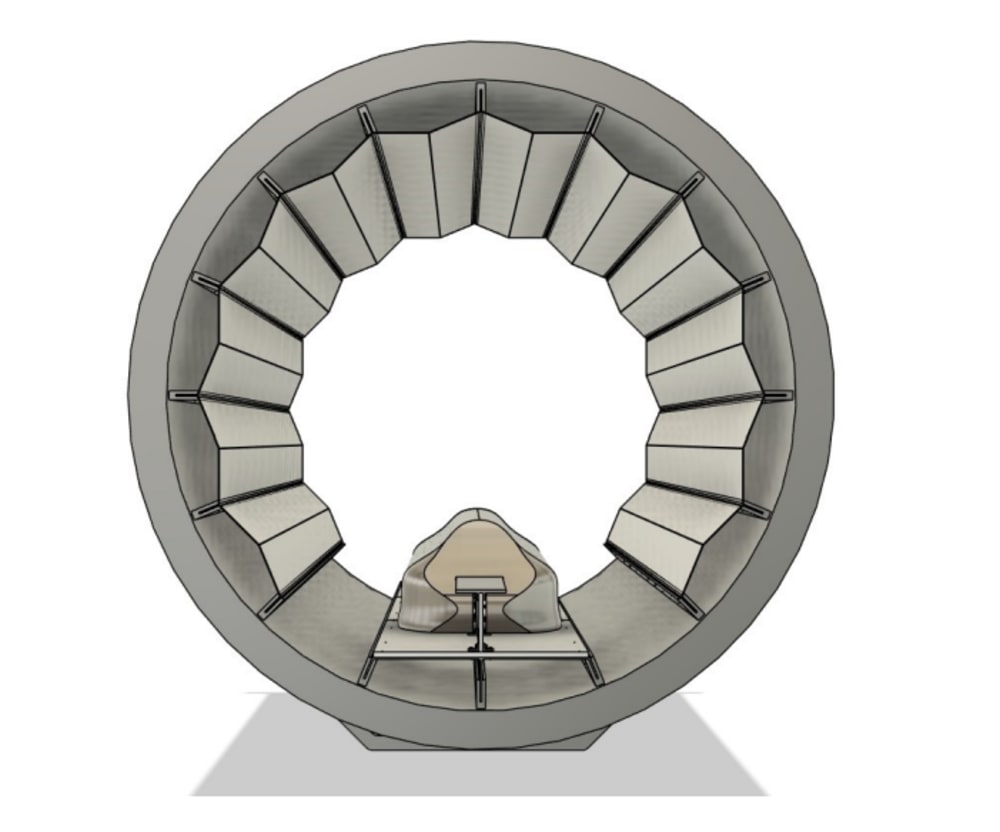
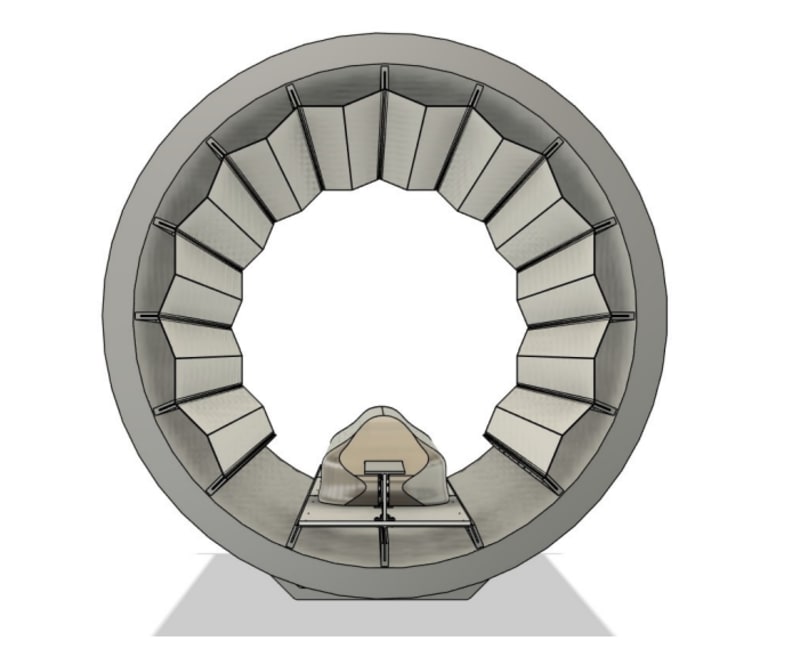
Electrodynamic Suspension (EDS) via Halbach arrays provides vertical lift and lateral stabilization without power consumption at cruising speed. Stabilizing wheels and calculated damping ensure multi-DOF control, allowing smooth operation within the vacuum tube’s tight tolerances. Structural simulations verify load-bearing integrity and vibration stability, ensuring safe operation at target speeds.
Feasibility is central to the pod’s architecture. The DLIM cores are constructed from TIG-welded laminated M19 soft iron, using industrial CNC machining processes for manufacturability. Windings use high-conductivity enamelled copper, while the pod chassis employs lightweight aluminium and composite panels, balancing strength and manufacturability. Thermal management is handled via core-integrated heat sinking and microchannel cooling in the battery system, validated through FEA and thermal simulations. LIM and structural casings were verified to withstand 500 N loads with negligible deformation.
Power is supplied by modular lithium-ion battery packs controlled by a smart BMS and high-current IGBT inverter, delivering 3-phase AC through intelligent switching. The embedded control architecture is distributed: microcontrollers and Raspberry Pi boards manage subsystems independently, using CAN protocols and real-time data acquisition for fault detection. A custom-coded diagnostics system maps faults by subsystem and severity, ensuring modular safety and self-recovery without human intervention.
This pod architecture has clear market relevance. Its scalable, low-maintenance electromagnetic systems are directly applicable to urban maglev, intercity freight, airport shuttles, and future high-speed transport corridors. The use of commercially available components and compliance with standards (IEC, ISO) ensures straightforward industry adaptation.
The track comprises an aluminium I-beam with a paramagnetic web optimized for electromagnetic interaction with the DLIM and eddy current brakes. The vacuum tube features modular segments with vibration-isolated supports, designed to maintain structural integrity under low-pressure conditions, while allowing easy assembly and maintenance. FEA validated minimal deformation and ensured alignment tolerances critical for stable, high-speed pod operation.
In conclusion, this design is a practical leap in automotive and transportation engineering—advancing frictionless mobility through electromagnetic propulsion and levitation. It balances cutting-edge innovation with industrial feasibility and broad real-world applicability across emerging transportation sectors.
Like this entry?
-
About the Entrant
- Name:Aahir Basu
- Type of entry:teamTeam members:
- Aahir Basu
- Adarsh Lakshman
- Vatsal Kalola
- Lokesh Rastogi
- Anshuman Lenka
- Ashish Kumar
- Divyanshu Shanker
- Piyush Raj
- Juhi Umrao
- Palash Ghosh
- Software used for this entry:Ansys, Solidworks, Fusion360
- Patent status:none