



Summary: This low SWaP-C electronic sextent is a vital tool for commercial shipping vessels and airliners as a backup or co-sensor to navigate in regions with disrupted GPS signal. As long as the sky is clear, this device provides continuous position estimation of < 1 nautical mile on a moving platform anywhere in the world. This simple design utilizes COTS sensors and computers to create a robust, compact, low power, and inexpensive navigation alternative for when GPS is unavailable.
GPS jamming and spoofing is a global crisis that affects war torn countries and those adjacent, annually costing airlines and shipping companies untold sums in the form of route delays and cancellations. These industries in the past have relied on LORAN and other such RF beaconing systems to triangulate position across land and sea, but these systems have become all but extinct due to the widescale adoption and reliance on GPS. Inertial navigation is prone to error growth and as such is unsuitable on its own as a navigation tool. Thus there is to date no reliable, let alone inexpensive, standalone backup or replacement to GPS for the purposes of long-distance navigation.
The traditional sextent has been used for centuries by sailors to navigate the ocean. Though it may seem amateur to man's modern technical capabilities, navigating the ocean via pocket watch and sextent works anywhere in the world, is impossible to disrupt (other than clouds), and with a skilled navigator can yield sub-nautical mile accuracy. With advances in MEMS and microelectronics, it is now possible to create a fully automatic electronic version of the sextent. Though not as precise as GPS or RF ranging tools, an automatic sextent would be accurate enough to enable pilots and captains to navigate across large land masses or oceans in an emergency.
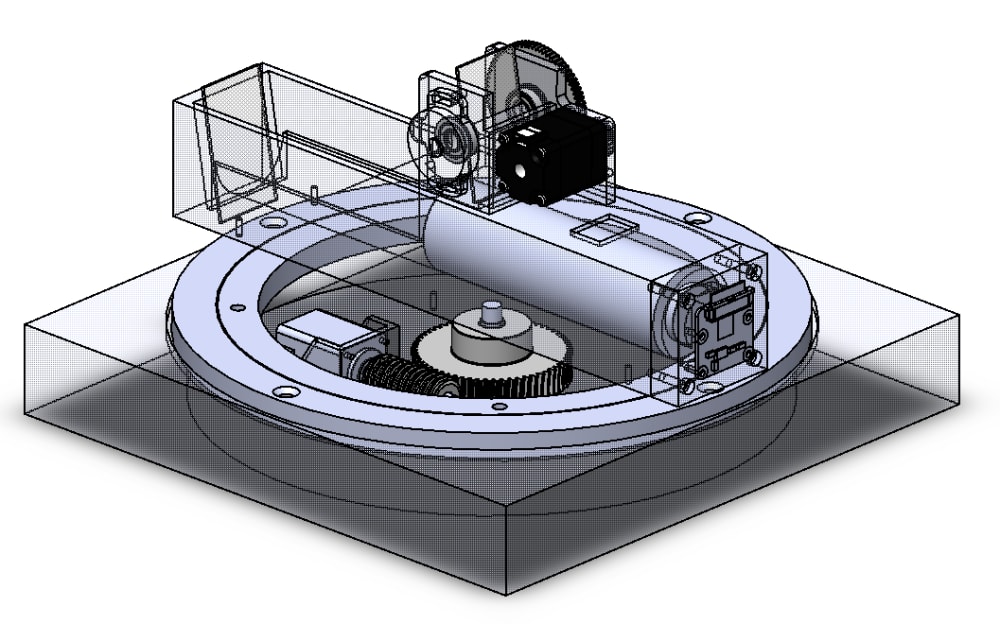
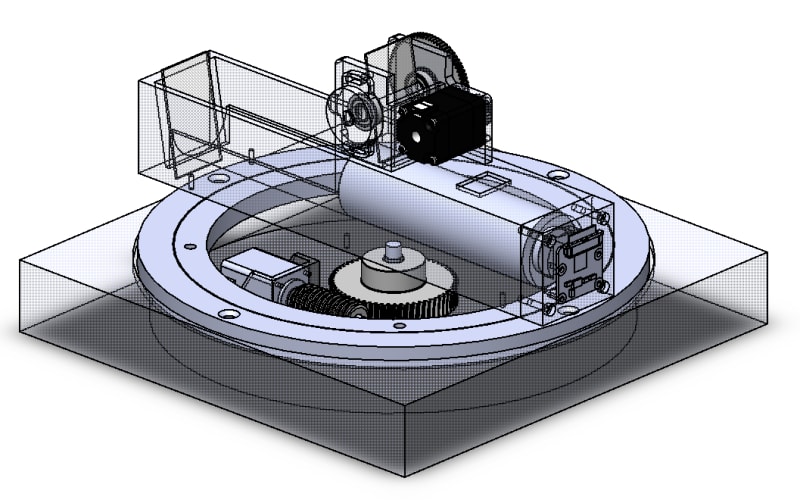
The design utilizes highly accurate but economical COTS electronic sensors to maintain reference to zenith, and copies the simple design of the traditional sextent with mirrors and a telescope to fold and magnify the image of the celestial body (CB). Simple image processing software is used to identify the center of the CB, and this is combined with the sensor data to provide a zenith angle. The zenith angle, along with a real-time clock and pre-computed celestial almanac is used to compute an estimated Line of Position (LOP). Subsequent measurements of the LOP will be fed into a navigation algorithm to compute a continuously updating position estimation.
The device is in the prototype phase, and preliminary results indicate that the cosensors have sufficient accuracy to allow for sub-nautical mile resolution. The robotic sextent has the potential to provide as a useful backup to navigators in various applications all around the world in areas stricken by GPS failure.
Like this entry?
-
About the Entrant
- Name:Nicholas Crescimanno
- Type of entry:teamTeam members:
- Nicholas Crescimanno
- Michael Crescimanno
- Lawrence King
- Paul Carney
- Software used for this entry:Custom Python and C++ packages will be developed for sensor acquisition and fusion, image processing, and navigation output
- Patent status:none