





Cotton harvesting is a crucial phase in the agricultural cycle, especially in cotton-producing countries like India. Traditionally, cotton picking is carried out manually by laborers, which poses several challenges. This task is labor-intensive, time-consuming, and susceptible to inconsistencies due to human fatigue, lack of training, and varying levels of attentiveness. As a result, farmers often face issues such as delayed harvesting, unintentional damage to cotton bolls, and improper handling of unripe cotton, all of which contribute to significant yield losses.
Moreover, the agriculture industry is currently grappling with a severe labor shortage, particularly in rural regions where the younger generation is moving away from farming. During peak harvesting seasons, the demand for labor spikes, driving up costs and creating accessibility issues. For small and medium-scale farmers, these constraints can lead to substantial economic losses and affect overall productivity.
Manual harvesting also lacks the precision to selectively pick only mature cotton, which can affect the quality of the harvest and ultimately impact the prices farmers receive. Furthermore, the repetitive nature of this job increases the chances of injuries and health concerns for laborers.
To address these multifaceted issues, there is a clear and urgent need for a solution that can automate cotton picking in a selective and cost-effective manner. This project—Smart Cotton-Picking Robot—proposes an innovative robotic solution using machine learning (ML), computer vision, and a suction-based mechanism to intelligently identify and harvest mature cotton. It aims to reduce dependency on manual labor, ensure consistency in quality, and increase operational efficiency, paving the way for the future of smart agriculture.
Concept statement
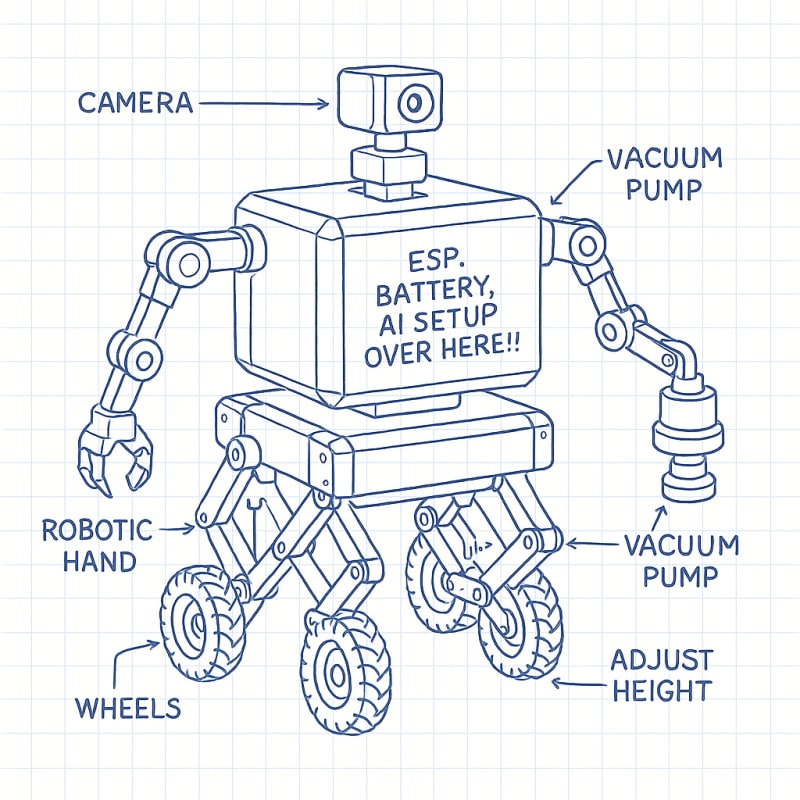
Our project proposes the development of a semi-autonomous robotic system designed specifically for cotton harvesting. The robot will consist of three primary components: a robotic arm, a suction-based picking mechanism, and a machine learning-powered vision system to identify mature cotton.
The robotic hand is built using a multi-degree-of-freedom servo motor structure that enables flexible movement and control. A suction pump with a soft-tipped vacuum extractor is attached to this arm, ensuring that only the cotton is plucked without damaging the plant. This mechanism has been inspired by existing open-source builds and customized to match the requirements of cotton picking.
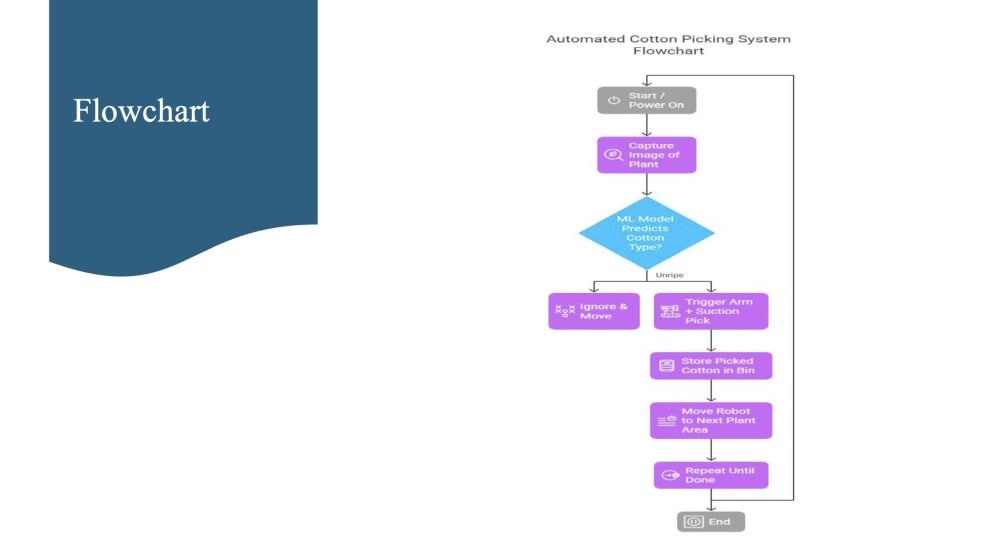
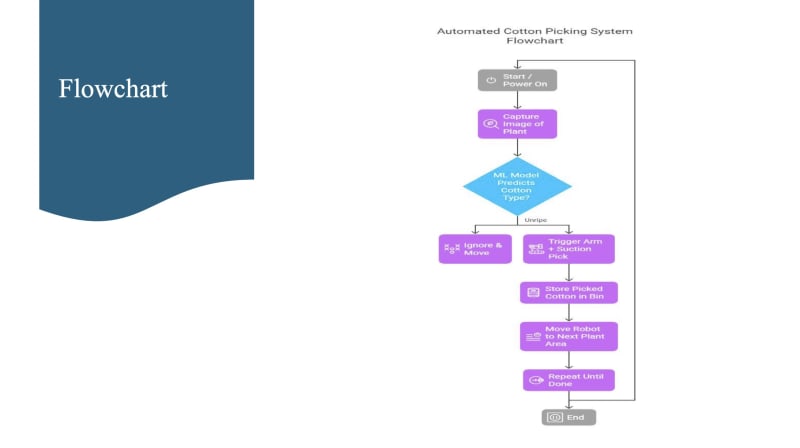
The brain of the robot is an edge ML model trained on cotton dataset images to classify bolls as mature or immature. The robot scans each plant in real time and, based on the prediction, activates the suction arm to extract only mature cotton. This selective picking method ensures a higher quality of output and minimizes the risk of crop damage.
Mounted on a robust mechanical chassis, the robot can traverse agricultural fields efficiently. To enhance mobility and adaptability, the legs of the robot are height-adjustable and fitted with soil-compatible tires. These design considerations ensure the robot performs well across varied terrain and crop heights.
By combining smart AI, modular robotics, and user-friendly control mechanisms, the Smart Cotton-Picking Robot is designed to be scalable, adaptable, and accessible to farmers, especially those who cannot afford expensive industrial harvesters.
Like this entry?
-
About the Entrant
- Name:Jay Bankar
- Type of entry:teamTeam members:
- Jay Bankar
- Gaurav Nimbalkar
- Maruti Nimbalkar
- Aditya Hon
- Suraj Ghodke
- Sarvar Tamboli
- Software used for this entry:ChatGPT
- Patent status:none