
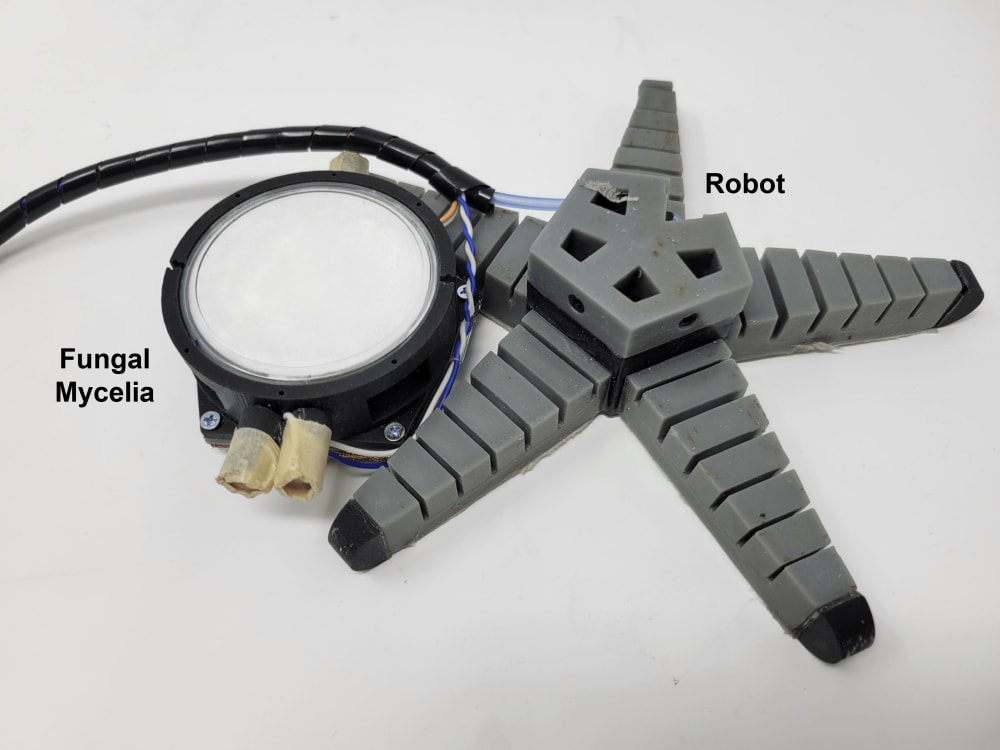


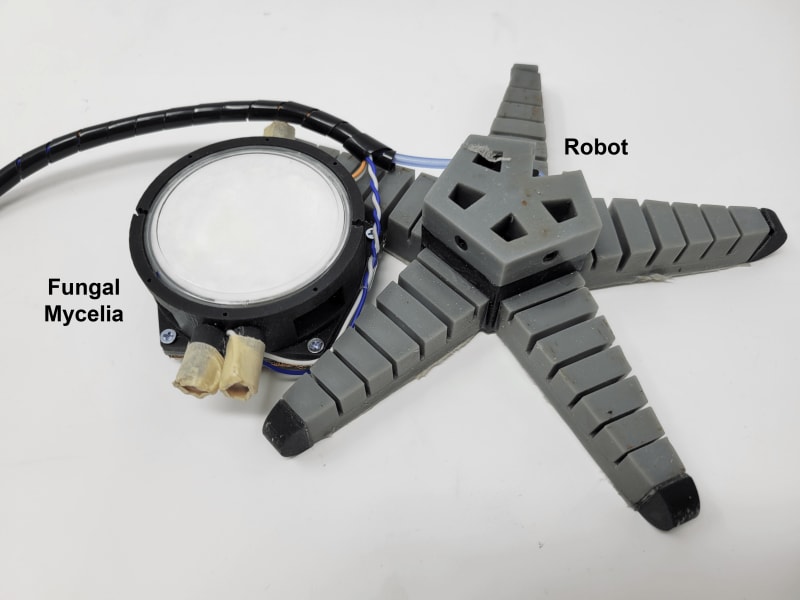




Current robotic systems face critical limitations in adaptability due to their reliance on centralized control logic and synthetic sensor arrays, which are difficult to scale for high-density, multifunctional sensing because of material and manufacturing constraints. These limitations restrict their utility in dynamic, real-world environments. In contrast, living organisms have evolved robust, decentralized networks that seamlessly combine sensing, decision-making, and response across vast, adaptive architectures. We harness this biological intelligence in a new class of biohybrid robots powered by Pleurotus eryngii mycelia.
Our platform uses fungal mycelium both as a sensor and controller. These networks generate action potential–like voltage spikes in response to environmental cues, including mechanical disturbance and ultraviolet (UV) light. The signals are recorded through a vibration- and EMI-shielded 3D-printed scaffold and converted in real-time to digital and PWM outputs that actuate either valves in a soft-legged pneumatic robot or motors in an untethered four-wheel drive platform. Control is achieved entirely through biological signaling, without the need for synthetic sensors, centralized processors, or rigid wiring networks.
The architecture is inspired by central pattern generators (CPGs), allowing spontaneous and stimulus-evoked electrical signals to drive rhythmic, adaptive locomotion. UV stimulation serves as a feedback mechanism to modulate gait in real time, forming a fully biologically integrated sensorimotor loop. Our system demonstrates long-term operability with stable signal acquisition over weeks, enabled by easily cultured, self-organizing mycelia that are resilient to harsh environments.
This approach addresses the longstanding problem of distributed sensing and control in robotics by eliminating the need for hardware-based sensor density. Unlike synthetic systems, which struggle with integration complexity and fail in extreme conditions, fungal mycelia offer dense, self-healing, and self-sustaining sensing across a naturally evolved network. These capabilities allow for biologically embodied intelligence, enabling robots to react directly to environmental signals using living tissue.
Beyond robotics, this technology provides a vision for intelligent infrastructure in agriculture and environmental monitoring. The same fungal scaffolds used to control robots can be embedded into crops, soils, or structures to create living environmental sensors that monitor chemical, mechanical, or optical changes. Mycelia are particularly suited for this role: they are durable, low-maintenance, and capable of functioning in drought, contamination, or radiation conditions where other organisms or electronic systems fail.
Our system is low-cost, scalable, and easily manufacturable using accessible fungal culture methods and commercial 3D printing. It requires no specialized laboratory infrastructure, animal tissues, or sterile conditions, and can be operated for weeks using minimal energy.
This work pioneers a new model of robotic intelligence—embodied not in silicon or circuit boards, but in living fungal networks evolved over millions of years. It solves the challenge of distributed sensing and control not by adding more hardware, but by co-opting biology’s own strategies for information processing and actuation. In doing so, it lays the foundation for a future where robots, sensors, and intelligent structures are truly alive—and deeply integrated with the environments they inhabit.
Video
Like this entry?
-
About the Entrant
- Name:Anand Mishra
- Type of entry:individual
- Software used for this entry:Solidworks, Python.
- Patent status:none