







Hybrid Remotely-operated underwater vehicle (H-ROV) is a robot that completes functions underwater on behalf of a crew, located on the surface, with whom the H-ROV is tethered. These functions include: search/recover, inspection, equipment repair, scientific analysis, dredging/trenching, cable-laying, and surveying.
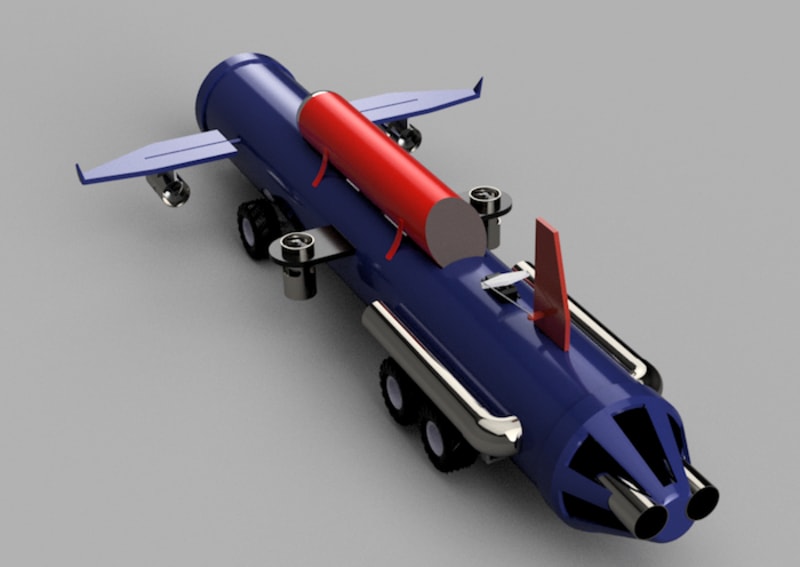
H-ROV is designed to work at desirable depth. It is steered by turning a rudder left and right and it adjust the altitude under the water by tilting the elevators. Water- pushing and creating a forward force is done by a propeller. A power source is engaged on this action with transmitter and receiver of 6 channel. It has two ballast tank for air and water.H-ROV is also provided with tyres and steering system so to work on land.A mechanical and an electrical system are working together for running the whole process.
H-ROV works on positive buoyancy. When all the inputs are shut off or in case of breakdown then due to positive buoyant force it automatically gets up to the surface of water unlike all the present ROV in the world which will get sink in the water. Hence, it can run as a boat over the water.It also has the future scope of flying in the air.
HROV has 4 basic motions:-
1. Moving forward without changing Altitude
In this motion Horizontal Thruster provide sufficient thrust for Forward motion.
2. Moving Up and Down
In this motion Vertical Thrusters provide sufficient thrust for the upward and downward motion without moving forward in the water.
3. Turning
In this motion vertical stabilizer i.e Rudder is used to direct HROV in Left and Right direction during the forward and backward motion of HROV
4. Moving forward and downward
In this motion the Horizontal Stabilizer i.e Elevators and the Horizontal Thrusters are used to change altitude while the HROV is in motion.
THE DETAILED DESIGN, CALCULATION, ANALYSIS, CAD MODEL AND REAL MODEL IS PROVIDED IN THE LINK GIVEN BELOW :
https://drive.google.com/open?id=0B7XuihK2IBpxUk85SUtENE0wbGM
Video
Like this entry?
-
About the Entrant
- Name:Furqan Shaikh
- Type of entry:teamTeam members:FURQAN SHAIKH, AASIM TEMRIKAR, HAMZA KHAN, ZAFFAR MULLA
- Software used for this entry:INVENTOR AUTODESK PROFESSIONAL 2017
- Patent status:none