




Autonomous vehicles are providing a new layer of occupant security while driving. The cornerstone of the research in autonomous vehicles relies on the effective use and interpretation of sensor data. Consequently, limitations such as weather disruptions can make sensors to be unreliable and cause severe accidents. To address this, vehicle-to-infrastructure (V2I) technology enabled information transfer to improve vehicle safety. However, current V2I systems only address warnings on weather or traffic alerts with no regard on how to improve driving maneuvering.
The innovation proposed is called Midwest Discrete Curvature (MDC) and is designed for current V2I technology. The idea is summarized as follows: To create a road guidance reference, independent of sensor data, for vehicles to navigate safely on roads.
MDC is the process in which geodetic road data is parsed along road directions and digitally stored in a road data matrix for V2I systems. Road data is discretized to geospatial points and curvature and road tangent vectorization, which can be utilized to generate consistent, mathematically-defined road profiles with deterministic boundary conditions, consistent non-holonomic boundary constraints, and a smooth, differentiable path which connects critical road coordinates.
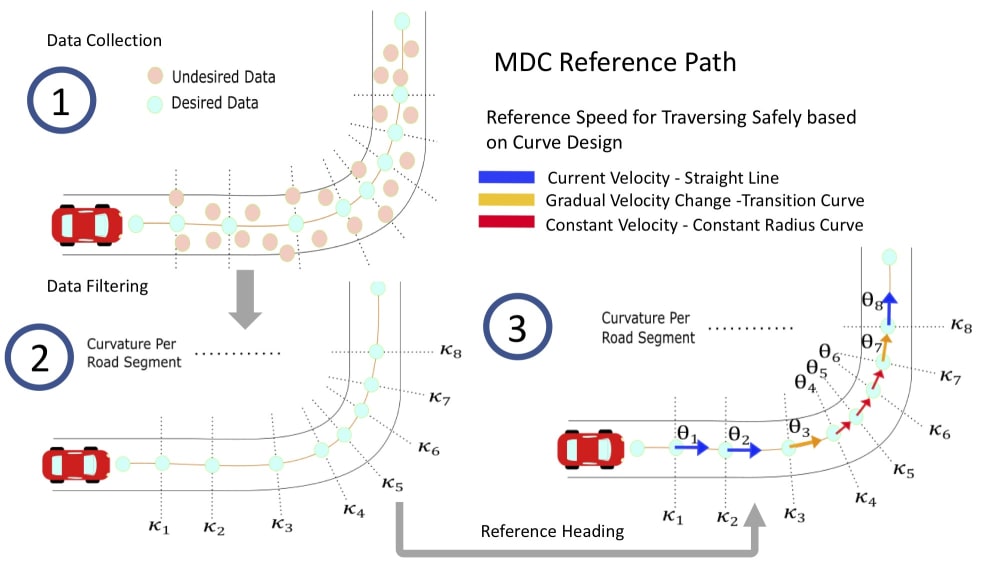
This road data is subsequently processed for generating dynamic guidance data profiles independently of vehicle sensors to provide vehicles with reference information to traverse curves. This method relies on vehicle dynamics and street design standards coming from the American Association of State Highway and Transportation Officials (AASHTO). The outcome is the MDC Reference Path which can used by autonomous vehicles for improvement in their driving. An example is shown in the first figure composed of three main steps: Data Collection, Data Filtering, and Reference Heading.
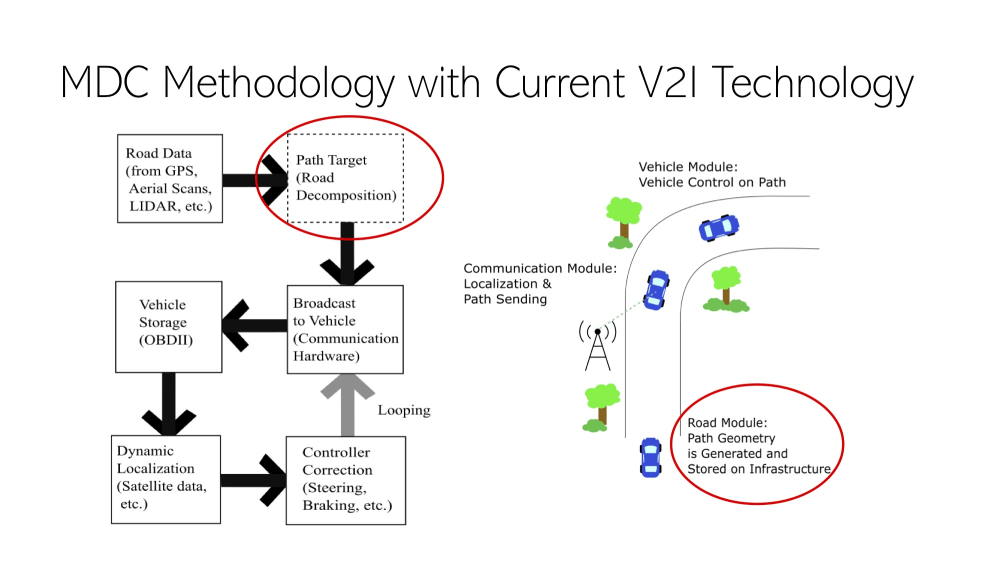
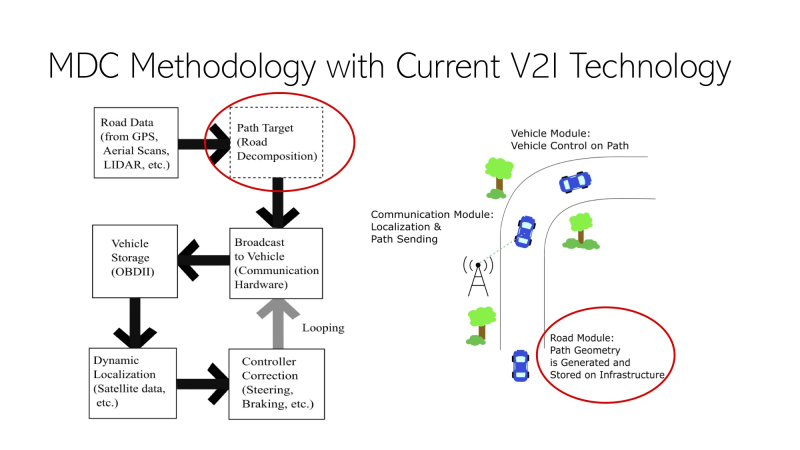
The MDC Reference Path is designed to be small in data so that it can be transmitted efficiently through V2I systems. Similarly, the data is designed to be representative of what is needed to drive safely under many road conditions such as varying coefficient of frictions or superelevation. This data is stored on what is known as Roadside Units (RSUs) which are being deployed by the United States Department of Transportation for V2I testing. Once a vehicle passes a proximity range, the RSU will transmit the MDC Reference Path and the vehicle will have a predetermined road shape to follow. The procedure of sending information, and controlling the vehicle is illustrated in the second figure called “MDC Methodology with Current V2I Technology”.
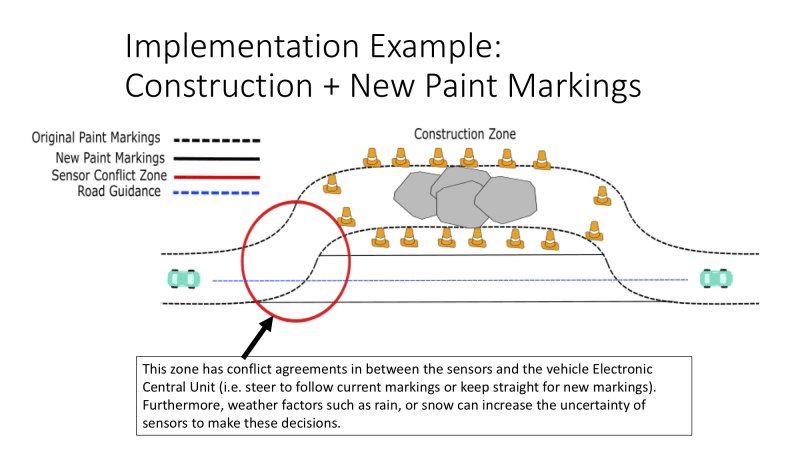
The implementation of this MDC Reference Path could considerably fill in the gaps in which current autonomous vehicle technology is encountering problems. For example, all light-based sensors suffer from the reflectivity of water in the form of droplets or snow. This changes the intensity detected by the sensors and misattribute object classification on their processing units. Another example is illustrated in the figure title “Implementation Example: Construction + New Paint Markings”. A final remark is that this method is not designed as a replacement, but a complementary solution to current autonomous vehicle technology. This method aims to improve the current level of autonomy to bring the new state-of-the-art.
Like this entry?
-
About the Entrant
- Name:Ricardo Jacome
- Type of entry:individual
- Software used for this entry:MATLAB
- Patent status:pending