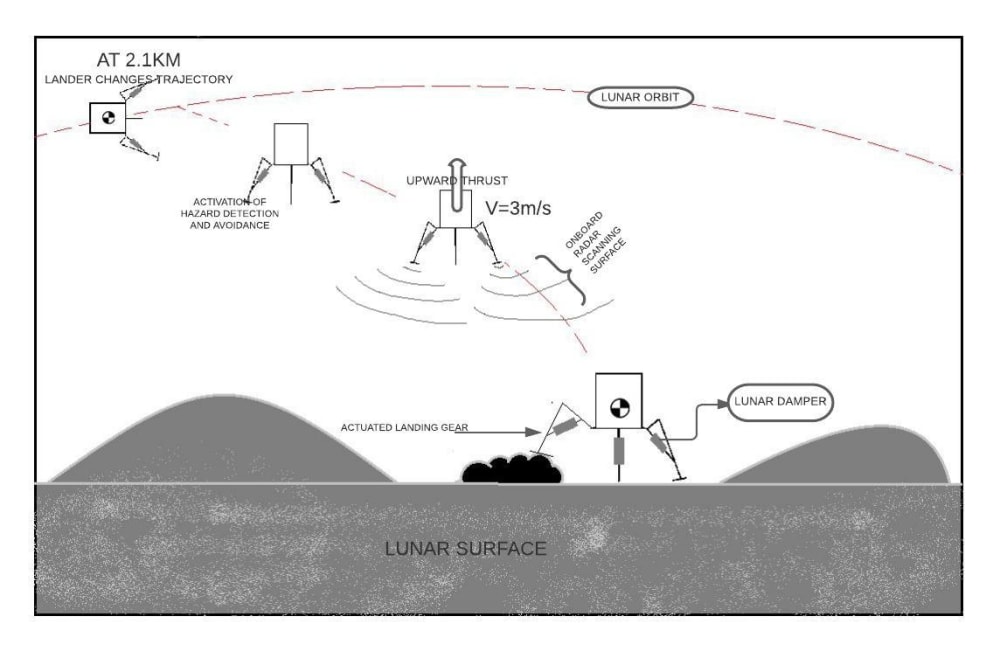
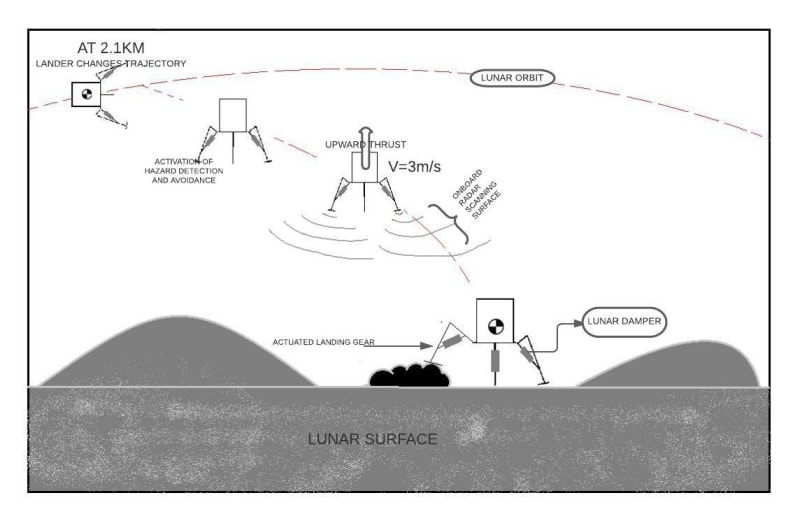



Almost twelve years after India’s 1st lunar exploration mission, India bounced back towards the moon with Chandrayaan-2. It was launched in an attempt to deploy a rover on the lunar surface. ISRO had attempted to give the craft a controlled and soft landing. But due to some technical faults, the lander was toppled and the mission failed. So we decided to work on improving the stability of lunar landers.
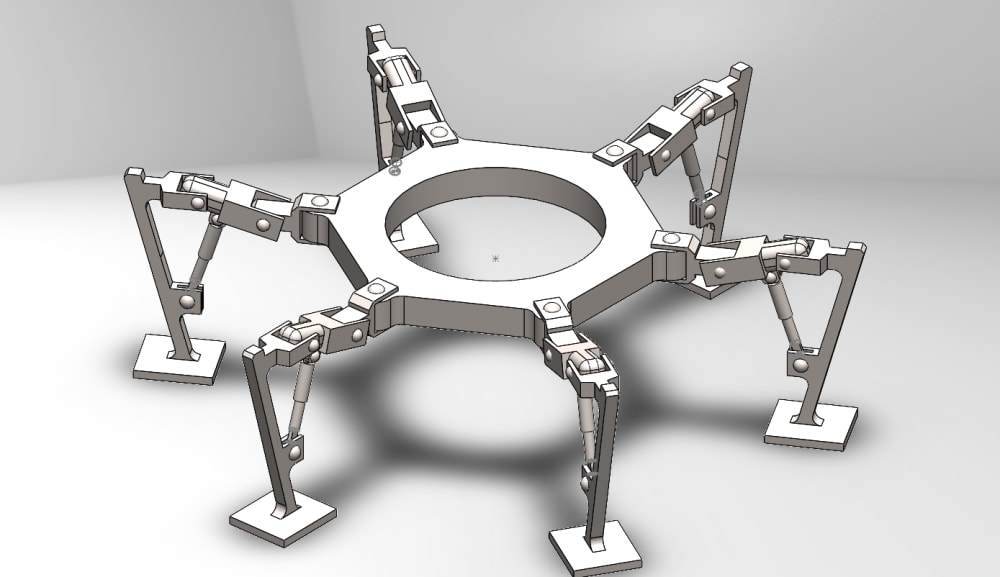
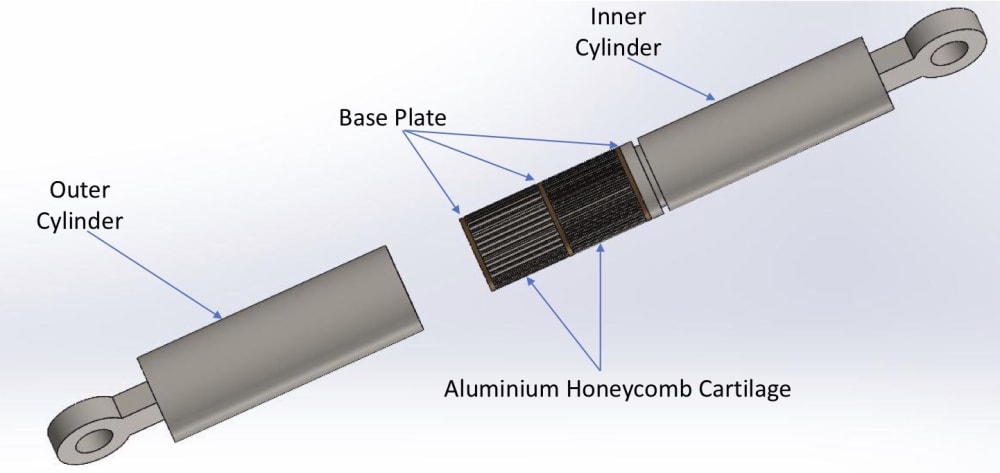
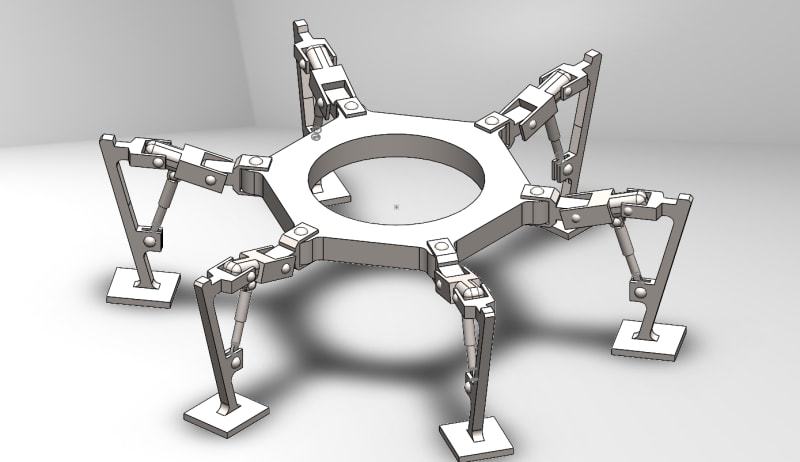
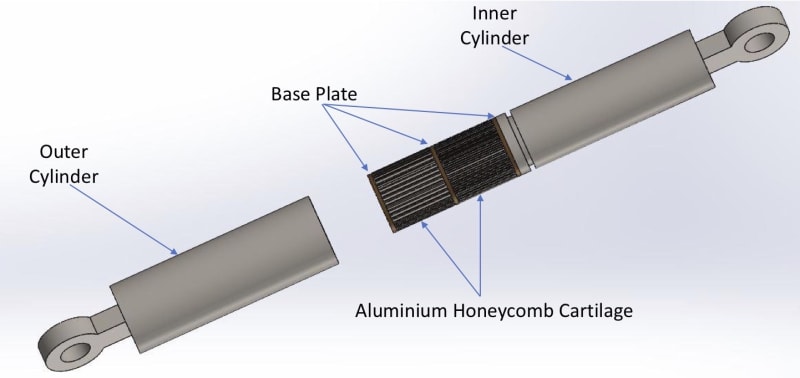
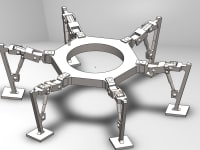
Generally, a 4-legged and a pod lander are used as the main structure of the lander. To achieve a soft landing, the lander should be lightweight and at the same time it should possess the strength to survive the free-fall of the 30 meters to the lunar surface. The principle design of this lander is hexagonal with every leg mounted on each vertex of the hexagonal undercarriage. In this enhanced six-legged plan, every leg is comprised of a honeycomb damper to absorb the impact energy as much as possible to protect the payload (rover) and onboard instruments when the lunar module touches the lunar soil. The majority of this force is absorbed by the honeycomb damper. The ordinary damper absorbs this energy and releases it by retaining its original form. This retention of the form or elastic nature of the damper may cause some serious issues when we are considering a lunar module landing on the lunar surface having less gravity. This makes the lander unstable even after the perfect touchdown and eventually, it may topple. For this reason, we decided to utilize an energy absorbent system which will result in a stable landing by locking the landing gears in real-time after hitting the lunar surface. To achieve this instant locking, the material inside the damper must be plastically deformed under loading conditions. Aluminum, being a directional lightweight energy absorbent material that provides a constant force during the stroke, can compress up to 70%-80% of its original length.
The legs are given foot expansions to acquire a solid grasp on the lunar surface and 360⁰ encompass assurance. The parts are amassed along with the assistance of rivets. These rivets are employed with a motor to give the free movements to these legs. As a result, legs will have a vertically upward and downward motion to get adjusted according to the demand as the lunar surface is very rutted.
These legs while functioning cumulatively with the onboard feedback systems will provide the module-required landing position and safety from the toppling. The piercing action of the legs will assure a firm foundation of the lander. Eventually, the lander and the payload will be secured and ready to carry out the next operation i.e. deployment of the rover.
This whole construction is produced using the titanium composite Ti-8AI-1Mo-1V. The empty space on the hexagonal surface will be utilized to mount the payload to be carried.
Please refer to the images attached for better understanding.
-
Awards
-
 2021 Top 10 Most Popular
2021 Top 10 Most Popular
Like this entry?
-
About the Entrant
- Name:Anurag Talekar
- Type of entry:teamTeam members:Anurag Talekar
Karan Jethwa
Ajinkya Dabholkar
Ajinkya Thombe - Software used for this entry:SolidWorks
- Patent status:none