

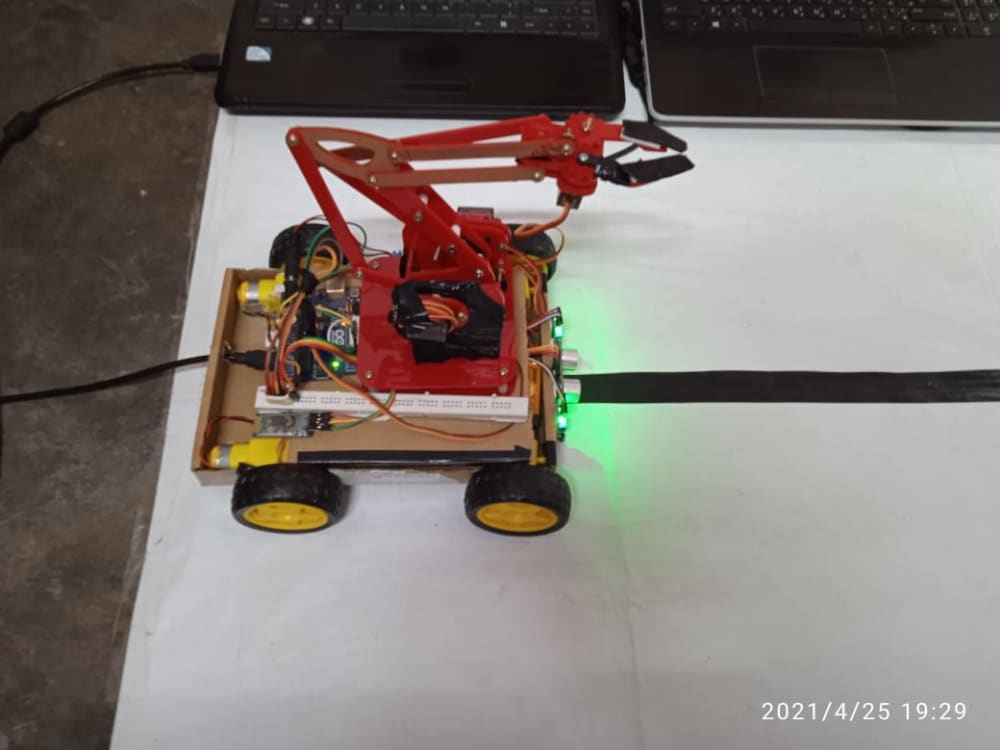






With the technological advancements in the field of machinery, the industries require advanced machines for material and components handling. Our project deals with a mobile robot which is automatically guided by the predefined programmed path and it takes and transports the component from one workstation to another workstation by using image recognition.
The mobile robot takes the components from the workstation by using the 4 DoF robotic arm and delivers to another workstation based on the program. The component space is also provided at the rear side of the mobile robot for placing the components by the robotic arm. The guided tape method is used for guiding the mobile robot as it is more flexible to change the desired path in a workstation. The image of the component will be captured by using the camera module and the captured image will be processed and recognized by using the OpenCV software.
According to the coordinates obtained from OpenCV, the 4 DoF robotic arm recognizes and takes the component from the workstation. It is also provided with the safety features to avoid the collidence by using various sensors and obstacle avoidance program. It also has different sounds and a light indicator to provide flexible control.
Our product makes less human interference in the transportation and material handling line and makes it completely automated.
Like this entry?
-
About the Entrant
- Name:Shanmugasundar G
- Type of entry:teamTeam members:D VISHWA
M DHARANIDHARAN
P GOKUL
L L MANOJKUMAR - Software used for this entry:Solidworks
- Patent status:none