
This design is primarily to be used to spark interest in younger generations in underwater exploration by making a vessel capable of shallow water exploration more available. It is a common fact that a huge amount of the ocean remains unexplored- about 95%- so there are so many resources that are yet to be found, and the machine can also be used to display just how much the ocean is being affected by pollution.
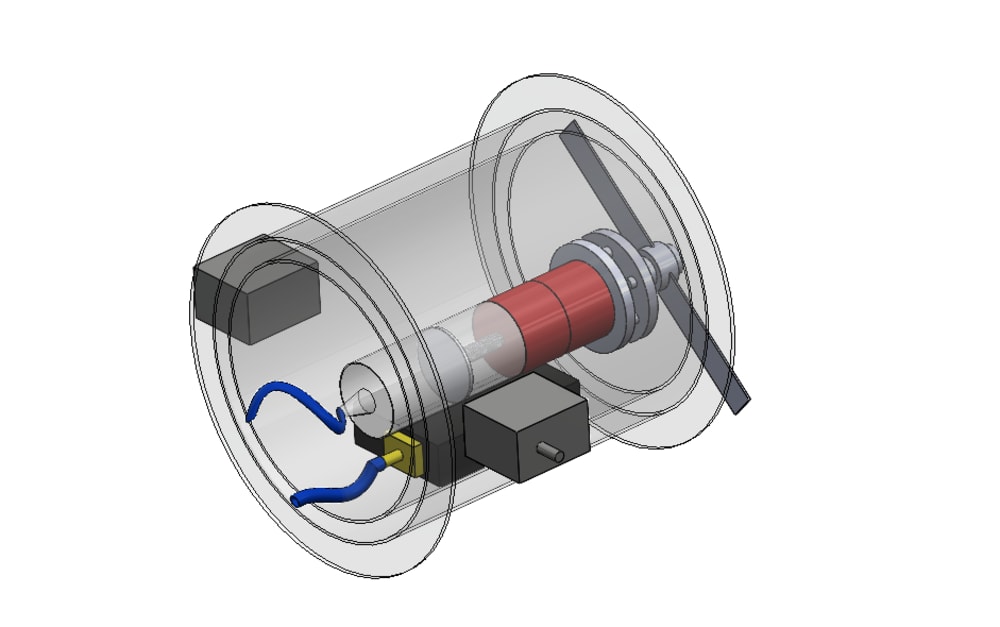
The design works using buoyancy. It starts off with a neutral buoyancy(displacing just a little less water than it weighs) and then takes in water from the surroundings or pushes it out using a syringe. The increase in the among of water in the syringe changes the weight of the device while the water displaced remains the same. The depth is controlled using a PID controller and a pressure sensor to measure just how deep it is and adjust to the desired input based on the error measured. The PID controller is then connected to a motor attached to the syringe with a threaded rod to constantly adjust how much water is in the vessel. There are two water pumps attached to the sides of the vessel to enable it to turn in either direction and a drone propeller is attached to the rear for forward/backward movement. The propeller is attached to a shaft which is connected to the inside of the vessel using neodymium magnets and the friction between the magnets and the vessel is reduced using silicone lubricant and low-friction tape, this enables a wire-free connection so there’s no risk of damage due to the water. All electric wiring is put in a potty before being dropped in the vessel to reduce any damage due to small water leaks, the water pumps are designed to be used underwater, so the wires connected don’t run any risk. A magnetically activated read switch is used to trigger a latching relay so one switch enables the battery while the other disables it, tis removes the need for direct contact with the inside of the vessel and reduces the chances of any water leakage. It is controlled using a simple radio controller connected to a mini-island that has a tether transmitting signal to the vessel as water easily disrupts signals of 2.4GHz. It also comes with cameras and LEDs attached to aid underwater exploration.
This idea can be applied at university research centers, sold commercially for entertainment reasons and the end goal with this design is to make it fully autonomous and large enough to have a large fleet of bigger vessels go into the ocean and gather all the waste that has been dumped in it.
The product is still in its test phase but after tests are concluded, and it has been further optimized, it’ll be manufactured using a contractor capable of assembling circuits and the rest of the product can be sold as a kit to be made at home.
Like this entry?
-
About the Entrant
- Name:Oluwalonimi Ajayi
- Type of entry:individual
- Software used for this entry:Solidworks
- Patent status:none