




Because our aim is to win the Google Lunar X-Prize (GLXP) in the most commercial and sustainable manner, our design has many practical applications. We are developing an inexpensive yet durable robotic platform, whose resistance to the much harsher conditions of the moon will enable it to be used anywhere on Earth.
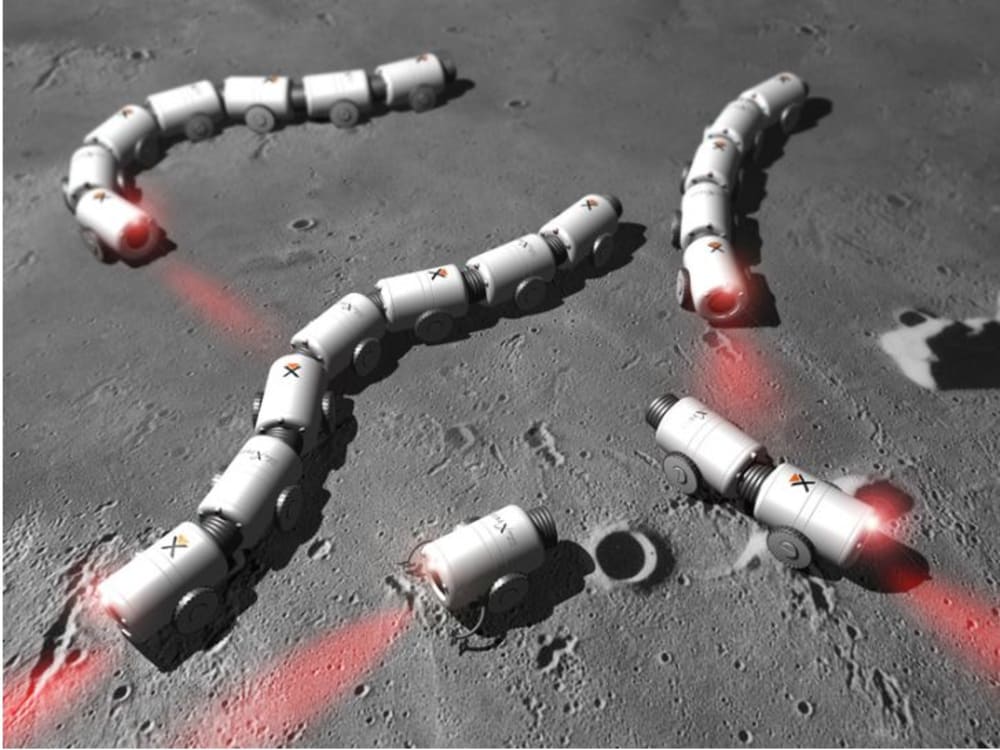
Similar to Mars Exploration Rovers, our swarm of eight to ten autonomous robots will land via airbags on the moon. Then, they will crawl and/or fly across the lunar surface for several hundred meters, capturing video with special JPEG2000 compression chips and searching for water with low-cost spectrometers. The robots’ piezoelectric and titanium composition allows them to withstand extreme temperature values and large temperature swings. A novel locomotion method utilizing peristaltic or worm-like motion ensures more efficient maneuvering across noisy surfaces and eliminates the risk of wheel failure caused by regolith contamination of bearings. Finally, nuclear, solar, and thermal energy provide power and maintain the “greenness” of our robots.
Thus, our design ensures a cheaper method combined with higher safety, especially in extreme climates and during natural disasters. Its water detection ability makes it a prime candidate for usage in third world countries where access to water is limited. Its increased mobility and endurance to extreme weather conditions will also aid with life detection during earthquakes and with data collection near places like volcanoes. By sending a robot in their stead, scientists need not risk their own lives.
Teams participating in GLXP will also reduce the cost of access to space and of building robots usable in space. Rockets are only expensive because so few of their parts (i.e. their engines) are made. In reality, they require a significantly lower amount of parts than a car. Furthermore, the space-based robotic platform is currently priced at two million dollars. As we have kept to the minimal GLXP requirements, our Earth-based design slashes that number to one thousand.
Our robot is simple to construct. Although it is intended for space, spin-off earth products only require basic manufacturing equipment and can thus be mass-produced. The core design is easily modifiable for specific applications--including but not limited to moon mining, satellites, and educational robotic kits. These may be used both on Earth and in space, enabling access to an uncountable number of extraterrestrial resources. Robots also decrease the need for human labor, a setback to profit in many products.
Our efforts also advocate STEM education. The JURBAN team is heavily committed to training disadvantaged students to build autonomous robotic systems. Ninety-five percent of the work is performed by students aged nine to twenty-four, the vast majority of whom are women and/or minorities. This is quite uncommon in engineering.
Outer space has always “paved the way for better things.” Without space, everyday items like the GPS and the TV cannot exist. Space, then, leads to improved technology, improved globalization--and, most importantly, improved quality of life.
Like this entry?
-
About the Entrant
- Name:Blaze Sanders
- Type of entry:teamTeam members:Dr. Jayfus Doswell
Ami Kumordzie
Emmanuel Toch Anifowoshe
Heriberto Reynoso
Isha Kandaswamy
Michael Lampart
Morgan Glaze
Alane Lim
Natasha Seelam
Raymond Tuazon
Richie Bauer
Lonnie Parker
Esteban Escobar - Patent status:none