






The Manta Ray Unmanned Underwater Riverine Craft (UURC) is designed to perform clandestine, persistent surveillance in riverine, inlets, harbors, and other coastal shallow water environments as well as providing a platform that can provide extended time-on-station research.
The Manta Ray is an Unmanned Underwater Systems (UUS) designed to operate in harsh environments (obstacles, weeds, shallow water, etc).
One of the major expected benefits on the Manta Ray will be its unique propulsion system, its Intelligence, Surveillance and Reconnaissance (ISR) capabilities, its ability to secure itself to the river/sea floor, the Hibernation and Energy Regeneration System (HERS), and plug-and-play payloads. Commercial applications of a shallow water riverine system are many, from harbor security, boat hull inspections, pipeline and cable inspections, to body search and recovery missions and sea-floor mapping and research.
The Manta Ray is designed to be deployed from a waterborne craft (surface or subsurface), aircraft, or from the water’s edge.
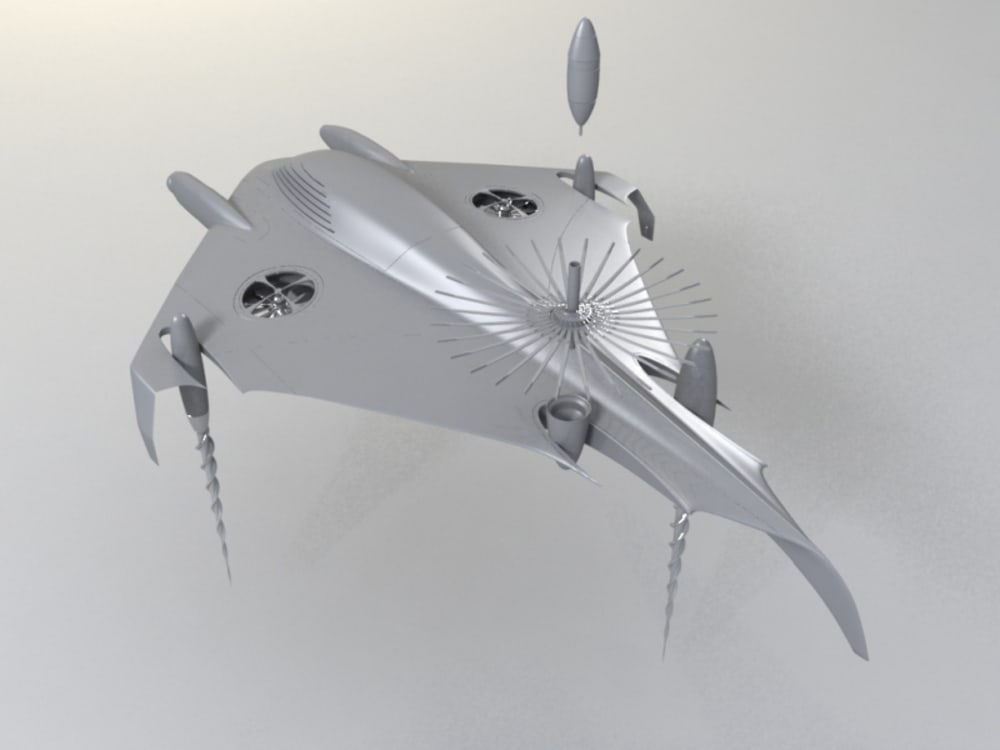
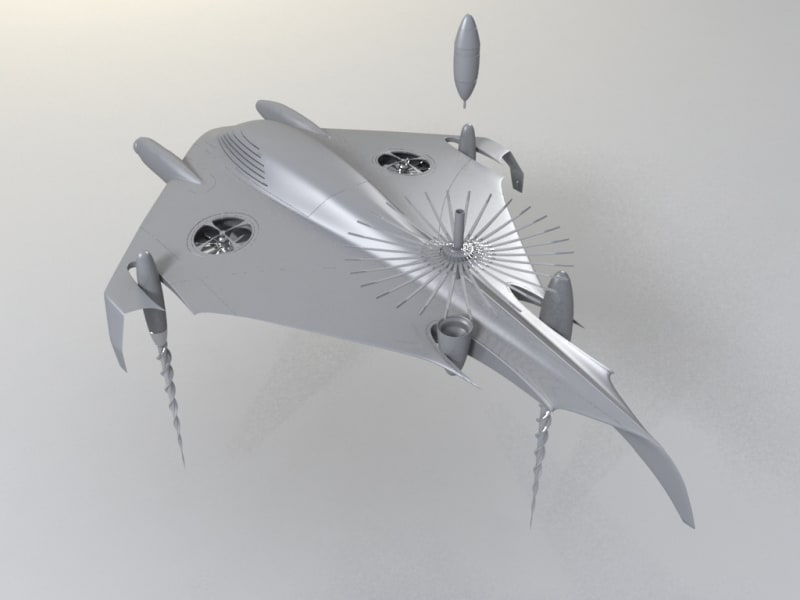
The overall concept of the Manta Ray is based around a unique fuselage design, pulsed water-jet propulsion system, and modular sensor packages. These design factors will allow the UUV to operate in hostile waters, in environments that other UUV’s cannot operate in, and do so for an extended period of time. When the vehicle is moving, it looks and acts more like a fish than a typical cylindrical UUV. This shape allows the vehicle to spread its internal components over a larger “footprint” while still having the internal capacity of larger vehicles. The flat design of the Manta Ray allows the vehicle to remain closer to the floor of the sea or river floor with less chance of detection. The flatter, teardrop design allows the vehicle (when the mission requires) to “hang” additional stores under its wings. This enables the vehicle to not only carry its own modular payloads, but also carry a variety of other sensors, both defensive and offensive, making it a multi-use platform.
The Manta Ray is specifically designed for riverine/rough, shallow water operations, but its design is scaleable, making it an ideal system for extended deep ocean research operations. With the Manta Ray’s internal propulsion and steering system, external control surfaces, external propulsions systems and props are no longer a necessity. With the absence of these protruding mechanisms, the vehicle will be quieter, lighter and a lower acoustic signature. The propulsion and steering system will allow the Manta Ray to operate in very shallow water where debris is likely to be present (weeds, old fishing line, tree limbs, trash, etc.). It’s designed to move and operate in hostile environments, which include rapid current scenarios. Standard UUV’s will have a difficult time staying in one location or going into a hibernation mode due to conditions commonly found in shallow water scenarios. The Manta Ray’s ability to rotate its augers, drill itself into the river/sea bed, virtually eliminate this problem.
Like this entry?
-
About the Entrant
- Name:Richard Adams
- Type of entry:individual
- Patent status:pending