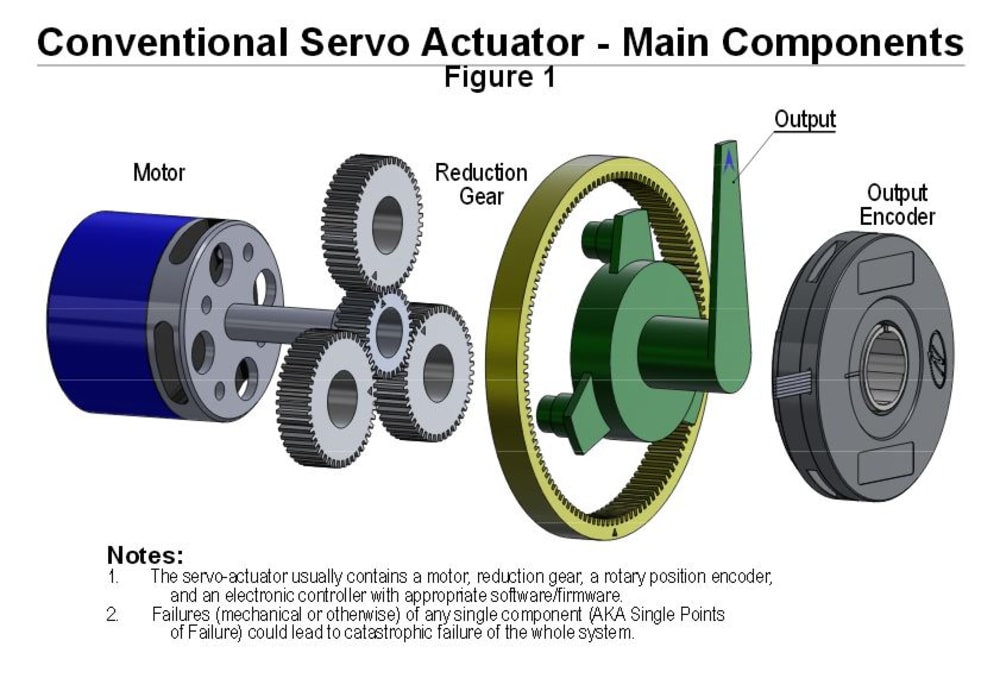






The Problem: The technology to do the above already exists, but all the components of the system have to be utterly safe and reliable. One of the critical components in such a system is the servo-actuator that operates the controls of the vehicle, unmanned or not. Currently, the vast majority of servos represent a series of single-points-of-failure as described in Fig. 1.
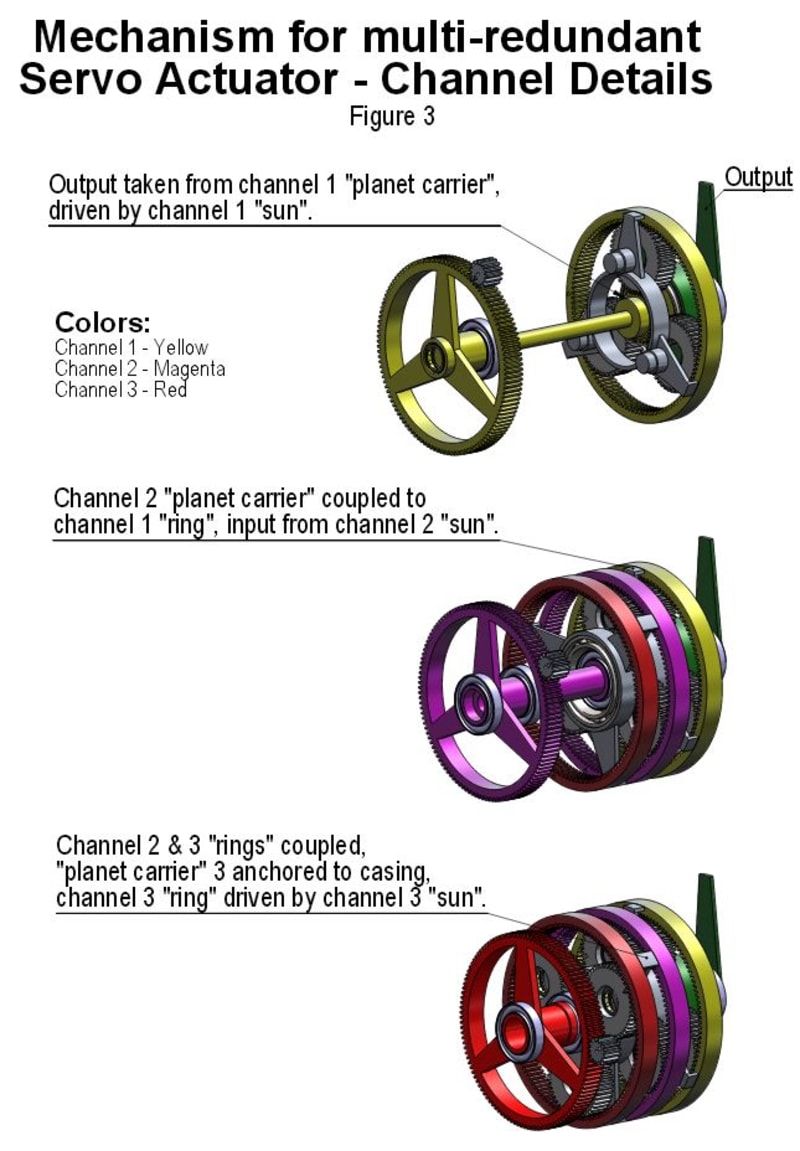
To reduce the risk of critical function failure, some machines use redundant actuators – two or more devices that can perform the same function. The idea here is to provide triple redundancy within the actuator: 3 motors, 3 gear trains, and 3 sets of control electronics – each set capable of performing the whole function independently. See Figs. 2&3. Since it is impossible to eliminate 100% of the single-points-of-failure, the proposed redundant servo still has one output. The risk of failure is dramatically reduced because the likelihood of two or more simultaneous channel failures is extremely small, and even then the 3rd channel can still complete the mission or avoid catastrophic failure.
Benefits: The increased safety and reliability will enable more intricate, sensitive, tedious, and/or dangerous tasks to be performed by machines. It will become easier to certify machines to perform tasks that are performed exclusively by people today.
Improvement: In the event of failure of one of the drive channels, each remaining channel can provide full torque over the whole operating range of the actuator, while contributing to one third of the output speed. Currently available redundant systems may provide full speed, but at the expense of output torque or travel.
Application examples:
• Autonomous unmanned devices operated in heavily populated areas.
• Increased reliability, safety, and ease of operation of manned vehicles.
Market potential: The UAV and Robotics market is growing exponentially and safety is a prime concern. Personally, I want to use my redundant servos in homebuilt experimental aircraft where I feel that a redundant fly-by-wire control system should be much more dependable than current purely mechanical systems, even if the system is manned.
How it works: A mechanical mixer is comprised of three concentric planetary drive channels driving a common output shaft, each contributing to one third of the output speed. Each channel has its own microprocessor motor controller and rotary position encoder, and each processor monitors the performance of the other two. In the event of failure of one of the drive channels, a “voting” process takes place, the faulty channel is neutralized, and the remaining functional channels continue working. All this happens at MHz speeds, making the reaction time orders-of-magnitude faster than manned systems, thus contributing further to safety.
Manufacturing: Conventional well known manufacturing methods will be used.
Production Cost: The product would have more components and therefore additional cost that would be offset by the added safety and reliability. One single event of “return-home” of a UAV, rather than total loss, should more than compensate for the additional cost.
Like this entry?
-
About the Entrant
- Name:Jeffrey Meyer
- Type of entry:individual
- Software used for this entry:SolidWorks
- Patent status:none