








The objective of the project is to help the physically challenged persons having both hand and leg impairments so that they can operate their bed and its movements through their voice commands.
Quadriplegia is paralysis caused by illness or injury to a human that results in the partial or total loss of use of all their limbs. They have to be in wheelchair throughout their life and have to be dependent on another person for moving from place to place.
This project helps them to operate their bed with their voice command and so making them independent and to lead life with a little more comfort.
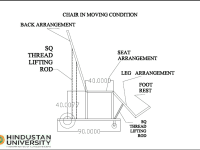
The main advantage of the project is the flexibility and comfort offered to the Quadriplegia patients to instantly convert the bed into a wheelchair and positioning according to their wish and comfort.
The project is built around Atmega 328 microcontroller. Voice recognition is done by EasyVR a multi-purpose speech recognition module designed to easily add versatile, robust and cost effective speech recognition capabilities to virtually any application. It has to be interfaced with a microcontroller, such that the input will be voice command and the output of the controller unit is used to drive the corresponding motors. At first, the voice is recorded into SRAM attached to EasyVR speech recognition module with the help of directly connected microphone. The voice recognition facility is supported with the EasyVR Commander by which we can add/remove voice commands, as well as train and test them.
After training the voice recognition IC the mode selection key is switched to voice input mode. The speech through the microphone at a particular instant is compared with the recorded sound and according to that digital output is generated.The output of voice recognition IC is then fed to the digital input ports of the Atmega 328 microcontroller. On receiving the signal the microcontroller directs the motors through the control circuit to process various voice commands like
Rise – This command will convert the chair from initial bed position to sitting position wheel chair and can be stopped at the desired level by using the Stop voice command.
Down - This command will convert the chair from sitting position to sleeping position and can be stopped at the desired level by using the Stop voice command.
Forward- This command will enable the chair to move in forward direction and can be stopped at the desired distance by using the Stop voice command.
Reverse - This command will enable the chair to move in reverse direction and can be stopped at the desired distance by using the Stop voice command.
Stop - This command will convert the chair from initial bed position to sitting position chair and can be stopped at the desired level by using the Stop voice command.
The voice controlled chair is operated with all safety limits by employing sensors for object sensing, speed, direction control and current sense feature for drive motors.
-
Awards
-
 2013 Top 10 Most Popular
2013 Top 10 Most Popular
Like this entry?
-
About the Entrant
- Name:Muthukumaran Gopalan
- Type of entry:teamTeam members:G.Muthukumaran
P.Prabhakaran
P.Moovendan
Shyam.R.Nair
A.M.Raja - Patent status:pending