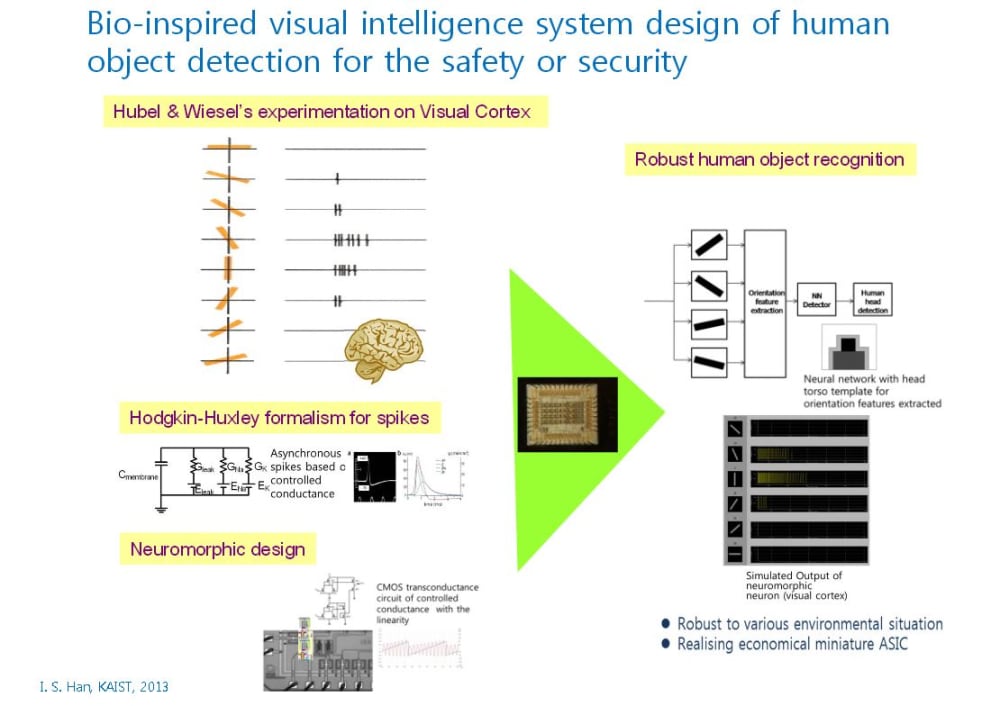


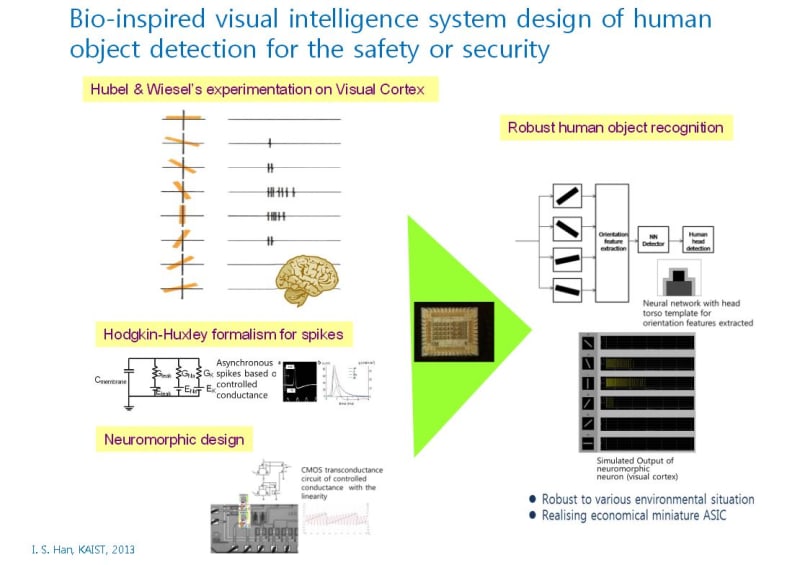


There has been much research on computer vision for the purpose of vehicle safety applications, making use of diverse methodologies like complex vision algorithms. However, despite its effectiveness, computer vision algorithms sometimes lack the robustness of mammalian visual system for the application in dynamic environments present in vehicle driving conditions. The new design approach of the neuromorphic visual information processing offers an alternative which mimics the robustness and flexibility of the primary visual cortex, based on Hubel and Wiesel’s experimentation and Hodgkin-Huxley formalism. The elements of implementation of neuromorphic visual system is introduced with the orientation tuned function of synaptic connections and the spiking neurons. The idea is applied to the detection or recognition of human objects with the head and torso shown, thought it can mimic the human or animals’ visual intelligence of recognising any particular objects under the extreme visual environment.
The effectiveness of the proposed neuromorphic visual processing system is evaluated for the safety enhancement via the 95% of pedestrian detection rate for alerting the electric vehicle driver to avoid the risk of pedestrians’ safety due to the silence of electric car. The market of automotive car safety devices will grow over 2 billion US$ per year soon, where the visual sensor is regarded as the essential solution recommended by EuroNCAP standard.
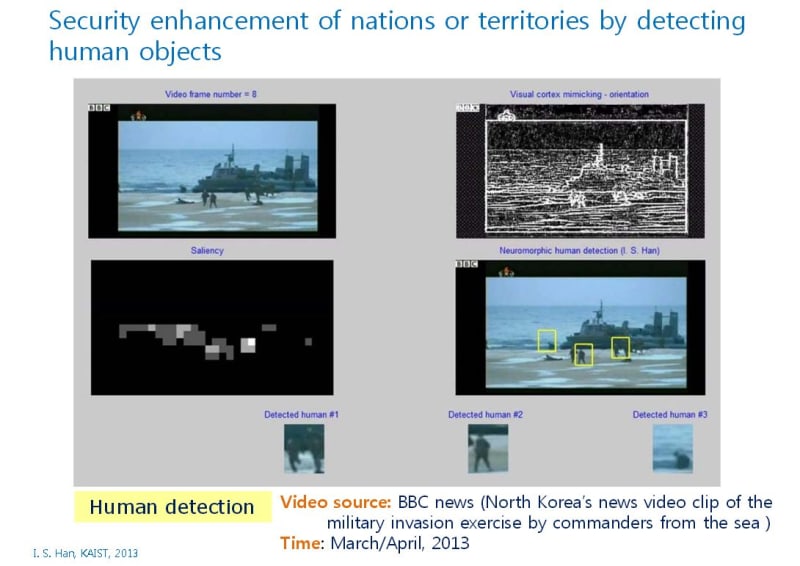
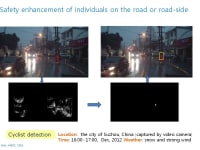
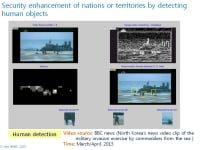
The robust performance under the limited sight environment of nature is observed during feasibility evaluation of early simulation, as illustrated by simulated results of two examples. The bio-inspired Neuromorphic vision is applicable to the security enhancement of outdoors, as demonstrated by detecting the landing personnel on the sea-shore. The idea is also applied successfully to detect the visual objects like vehicle or particular part of human body. The proposed idea has the advantages of not only the robustness of illumination changes from day to night but also the solution to detect the pedestrians or equivalent coming-in from the road-side.
The proposed idea is implementable in a very cost-effective and reliable device based on the VLSI ASIC, which can even be integrated as part of sensor. Or it can be realized by software integration of Neuromorphic algorithm into the computing platform. As either manufacturing methodology is eligible depending on the business environments or social requirements, the bio-inspired visual intelligence of Neuromorphic vision will give the variety of opportunities to improve the public security or prevent individuals’ injury.
-
Awards
-
 2013 Top 100 Entries
2013 Top 100 Entries
Like this entry?
-
About the Entrant
- Name:Il Song Han
- Type of entry:individual
- Software used for this entry:MATLAB, SPICE
- Patent status:pending