








The challenge to design the rear suspension of a rear wheel drive sports car has always been one of optimizing the position of both wheels and therefore the contact patch of the tires in order to obtain the maximum possible limit acceleration.
This project takes the active kinematics idea a step further, and for the first time, we present an active system which allows complete control of the wheel by controlling the toe and camber angles on the fly. This allows a more complete control of the contact patch condition which can then further optimize the overall dynamics of the vehicle.
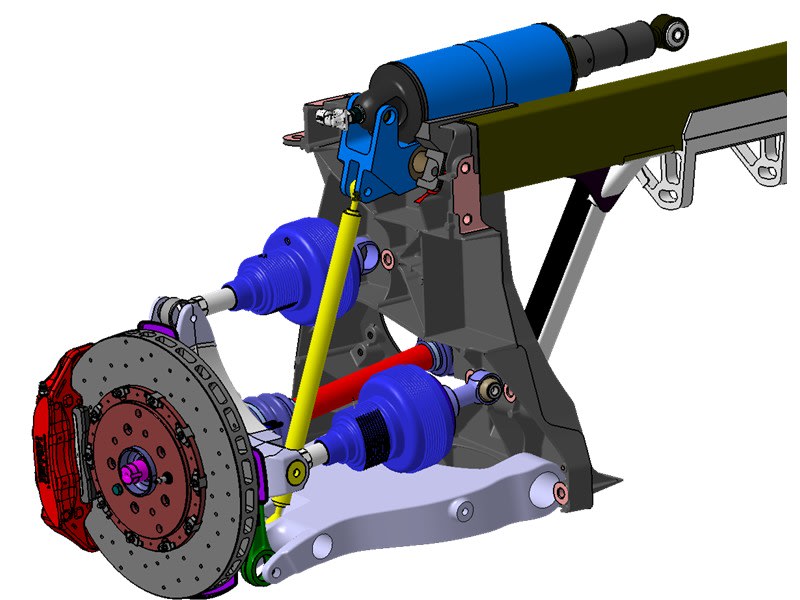
This system, called Active Kinematics Suspension (AKS), is realized by four electromechanical actuators (two per side) in a sophisticated multilink axle. This allows direct manipulation of the camber and toe angles of the rear wheels by changing the length of two of the links.
A high level vehicle dynamics controller then drives this system based on achieving two measurable targets;
1. Improvement of the frequency response to steering input. This is appreciated by the driver as higher precision steering and better overall driveability.
2. Improvement of the traction performance by increasing the grip at the limit, and also increasing the stability below the limit.
A high level of synergy between camber and toe control has been defined, optimizing lateral acceleration gain and delay (camber) and yaw rate gain and delay (toe)
-
Awards
-
 2013 Top 100 Entries
2013 Top 100 Entries
Like this entry?
-
About the Entrant
- Name:Isabel Ramirez Ruiz
- Type of entry:individual
- Software used for this entry:Catia, Matlab, AMESim, Adams
- Patent status:pending