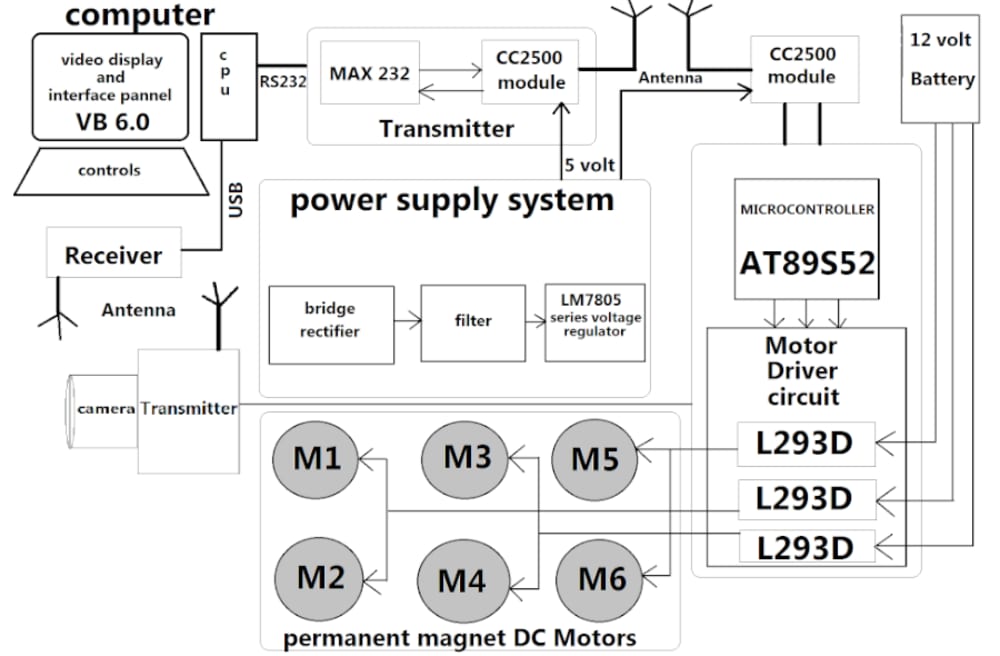

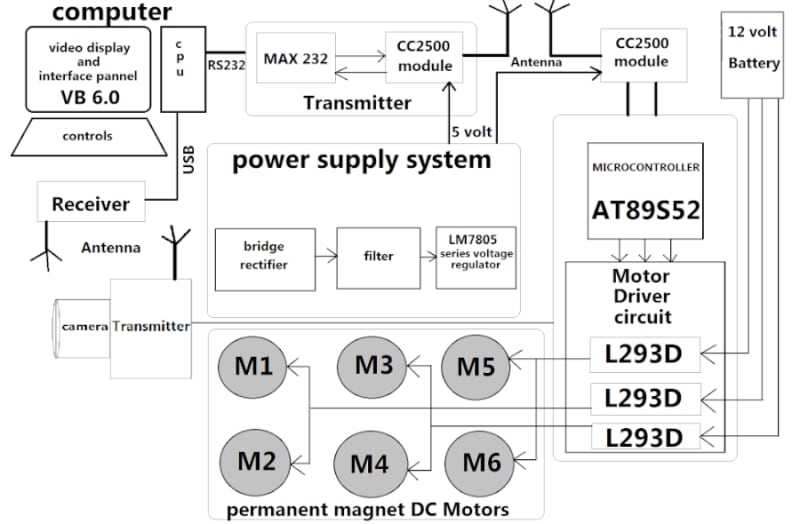

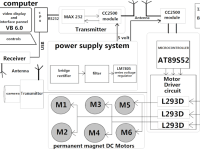

This idea describes the development of SAROPAN, an all terrain chain belt mechanism robot, wirelessly controlled and automatic (dual mode operation) and camera mechanism for surveillance. It also describes the development of a software interface which allows several open and closed- loop control methods to be easily implemented. The developed hardware and software modules provide for an open and modular system for research purposes. This is demonstrated through the RF wireless control of the robot using Visual Basics 6.0 based software modules. The open loop system inputs implemented are motion control and kinematics via keyboard inputs. The closed-loop control methods use an external camera for vision based position feedback. The controlling algorithm was first formulated and then executed using embedded C language. Various mechanisms of surveillance had been introduced using a camera.
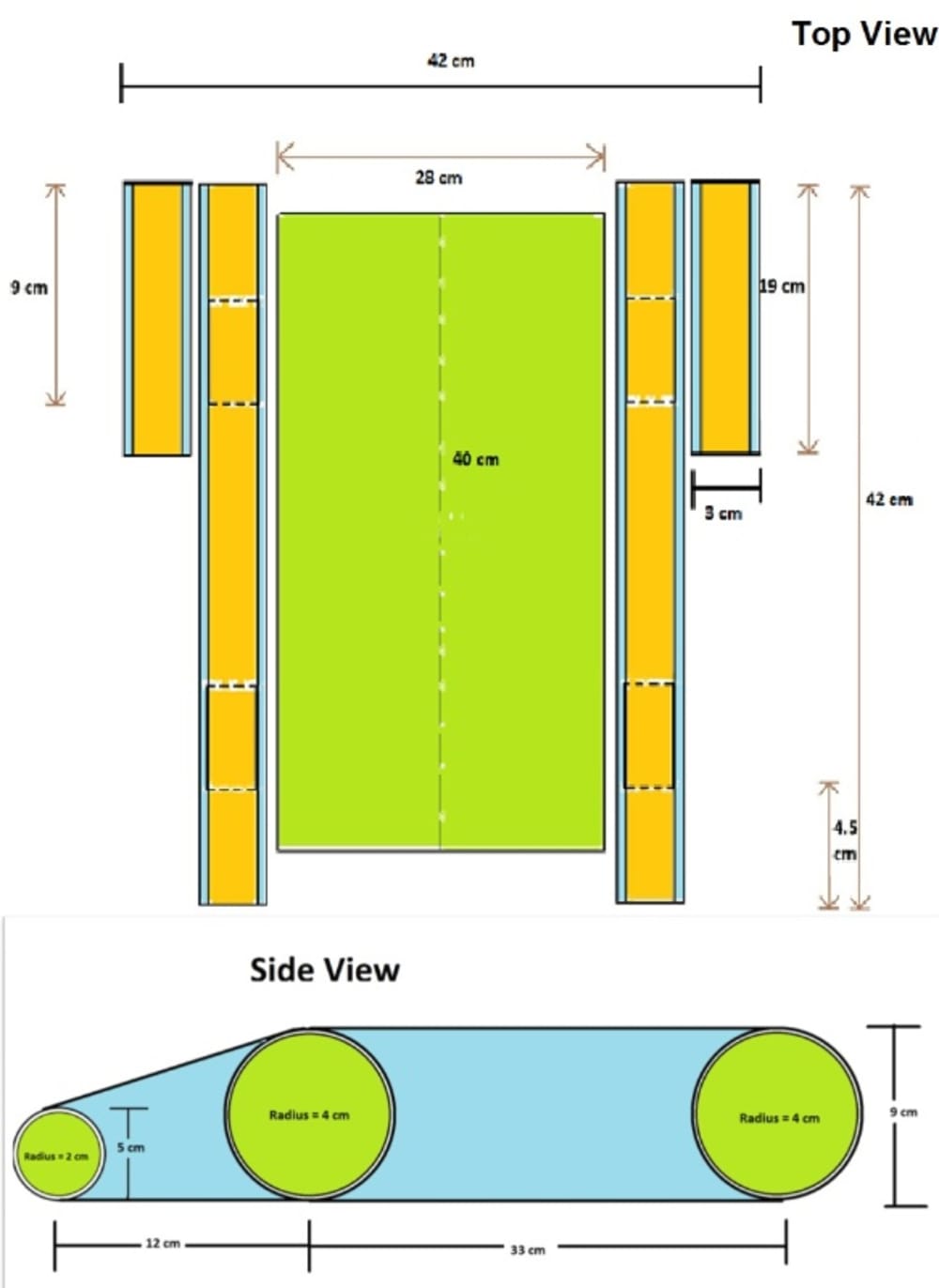
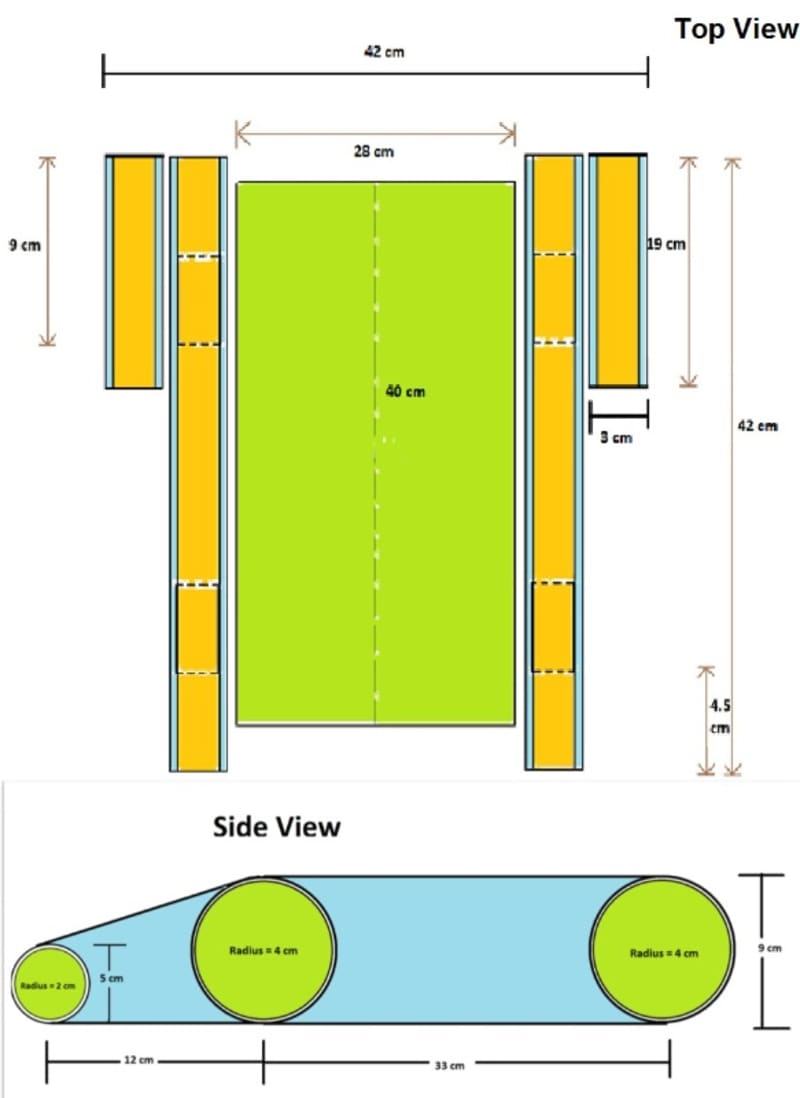
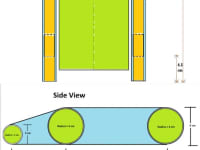
This report consist of Z- Elevation mechanism which allows flexible movement of the robot at multi terrains and object detection using image capturing and live video streaming simultaneously. For disaster mitigation as well as for urban search and rescue missions, it is often necessary to place sensors or cameras into dangerous or inaccessible areas to get better situation awareness for the rescue personnel, before they enter a possibly dangerous area. This project develops a surveillance robot which along with the above requirements are agile, fast and can work on a variety of terrains. It is designed in order to use the satellite information for maneuvering to the odd corners of earth terrain. Also, can position its trajectory and targets due to enabled Global Positioning System. The object capturing, segmentation and optimization through specially designed cameras helps SAROPAN to navigate and encounter tough terrains. It is equipped with path planning, trajectory location, object detection and obstacle avoidance mechanism. it meets much of the futuristic needs of the defense requirements.
Like this entry?
-
About the Entrant
- Name:Somshekhar Mohanty
- Type of entry:individual
- Software used for this entry:MATLAB, CAD, PSpice
- Patent status:none