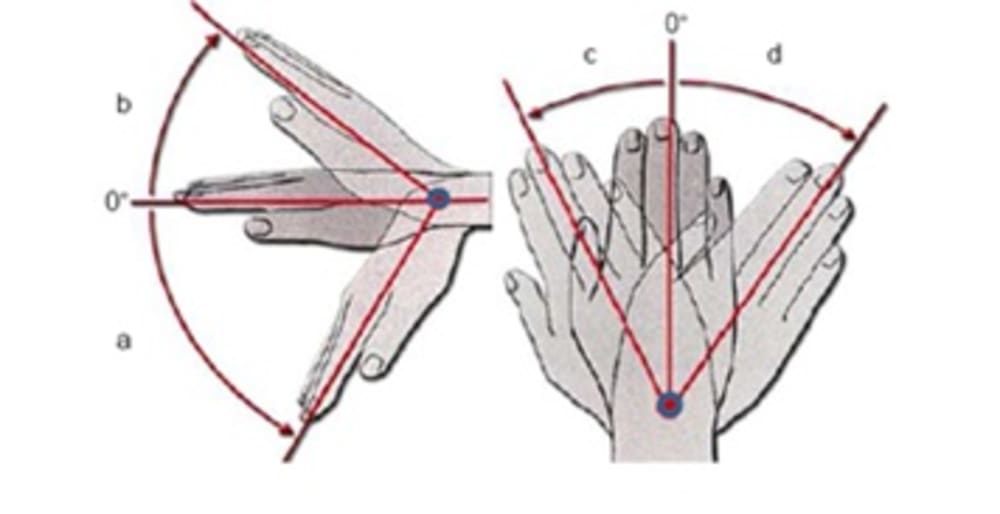

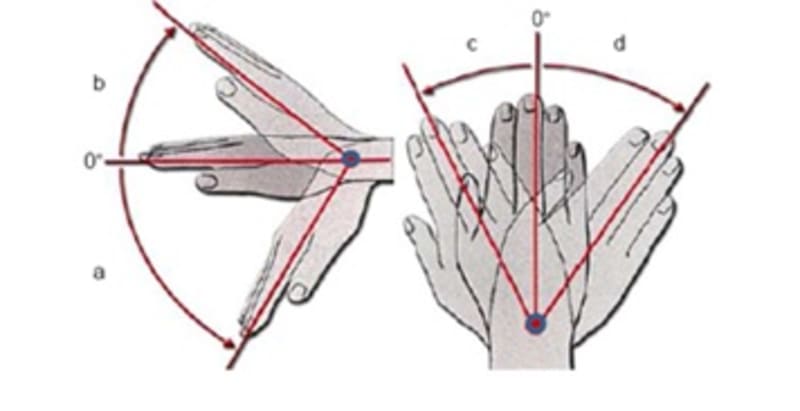
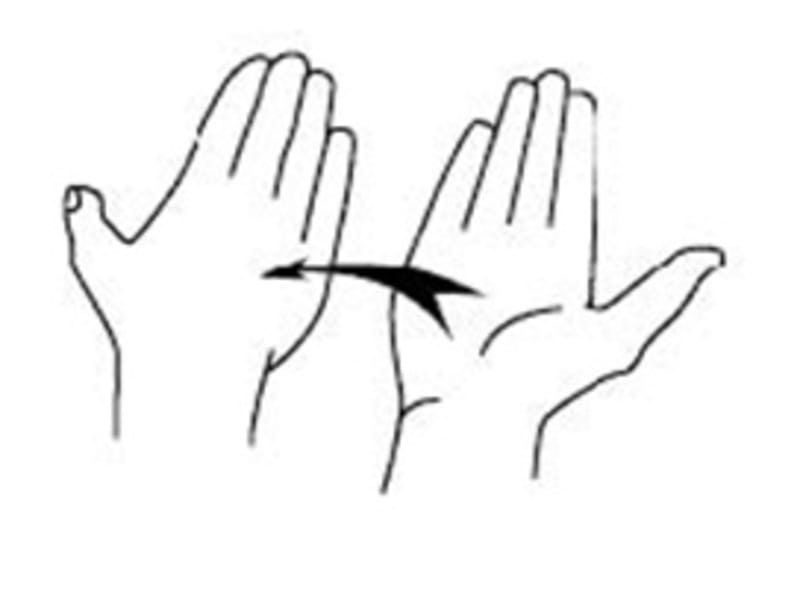

Development of a Humanoid Robot Wrist (HRW) comprising of a 3-DOF mechanism, which can perform all possible motions equivalent to human wrist.
Viz. Palmar-dorsal flexion, radial-ulnar abduction and Wrist twisting.
Proposed Research work aims at following:
1. Design of Humanoid Robot Wrist (HRW) with three DOF’s (Palmar-dorsal flexion, radial-ulnar abduction and Wrist twisting.)
2. Mathematical Modeling and Analysis (Kinematic, Inverse Kinematic, Dynamic.)
3. Prototyping and practical implementation of HRW.
4. Theoretical and experimental investigation of performance designed, developed humanoid hand.
Recently, significant advances have been made in ROBOTICS, ARTIFICIAL INTELLIGENCE and other COGNITIVE related fields, allowing making much sophisticated biomimetic robotics systems. It was found that, current research directions targeting a more functional hand designs like human hands. All such efforts were directed towards improving robot hands dexterity and performance. Proposed research work is directed towards development of mechanism for hand movements (Palmar-dorsal flexion, radial-ulnar abduction and Wrist twisting), development of hand mathematical models (including articulated hands dynamics, kinematics, and configuration optimizations) and finally development of prototype of humanoid robotic wrist (HRW).
Introduction
Recently, humanoid robots have been developed by many research groups to assist with human activities. In order to operate in an anthropomorphic fashion, a humanoid needs to have enough actuated motional Degrees of Freedom (DoF) to execute most human actions. The novelty of humanoid robots lies largely in their mechanism design. They require compact packaging while delivering enough torque and speed for task execution. The design of the robotic arm consists of the mechanical structure design, an algorithm for trajectory planning and an electronic control system. The mechanical architecture consists of the physical design of the robotic arm, the placement and alignment of the actuators, the gear assembly and the sensors.
Like this entry?
-
About the Entrant
- Name:Prasad Pandit
- Type of entry:individual
- Patent status:none