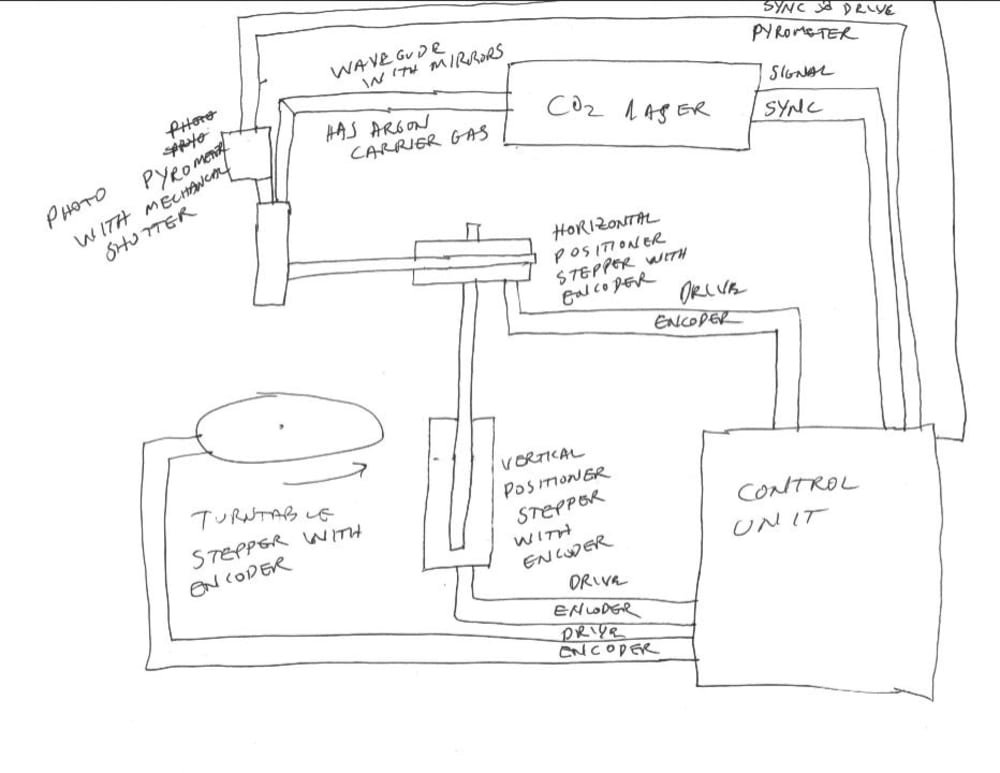




This design is to use a standard powder feeder that is available from sources such as Praxair or Thermach. It uses a pulsed laser to melt powder and feedback to determine the state of the melt puddle. The feedback is from an optical pyrometer that has a mechanical shutter to protect it from the laser, as the laser and pyrometer can't be used at the same time.
The pedestal work surface will rotate, and be synchronized with A, B, and Z pulses from an encoder. It will speed up and slow down depending on the location from center for constant surface speed. Other axis horizontal (from center) and vertical (height) are with linear positioners with encoder feedback. Encoder feedback is used because stepper motors do loose position if there is any binding. Also steppers have low torq at higher rpm.
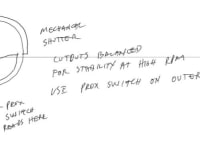
The shutter is made from a ferromagnetic material such as 300 series stainless so a prox switch can be used to synchronize the laser pulses with the shutter for protection of the pyrometer. The Pyrometer feedback will vary the pulsewidth for control of the laser power so the melt puddle will be small, yet enough for fusion to the base or already deposited material.
The laser will be focused through a specially designed powder nozzle similar to what is used for laser cladding, and the cover gas will be argon. This can be used for any metal or alloy, or even carbides mixed with metals to form composites.
There are some materials that if used such as titanium that will require the whole system to be placed into a vacuum chamber and backfilled to a controlled pressure with argon. All positioners can be put into the chamber if cooled internally and sealed properly to keep the cooling medium out of the chamber.
The control would be though a PLC interfaced with a PC using available 3D printing software, and custom written interfacing programs.
Full design has not been started, but if there are some interested I could design the system and build it as a custom machine.
This is a project that I was thinking of working on a few years ago for a masters thesis, but realized that it would cost too much and require access to a full machine shop and welding equipment. I currently have designed and built a plasma spray system for vacuum spraying of parts before I became employed with my current employer.
Like this entry?
-
About the Entrant
- Name:Paul Robinson
- Type of entry:individual
- Software used for this entry:none
- Patent status:none