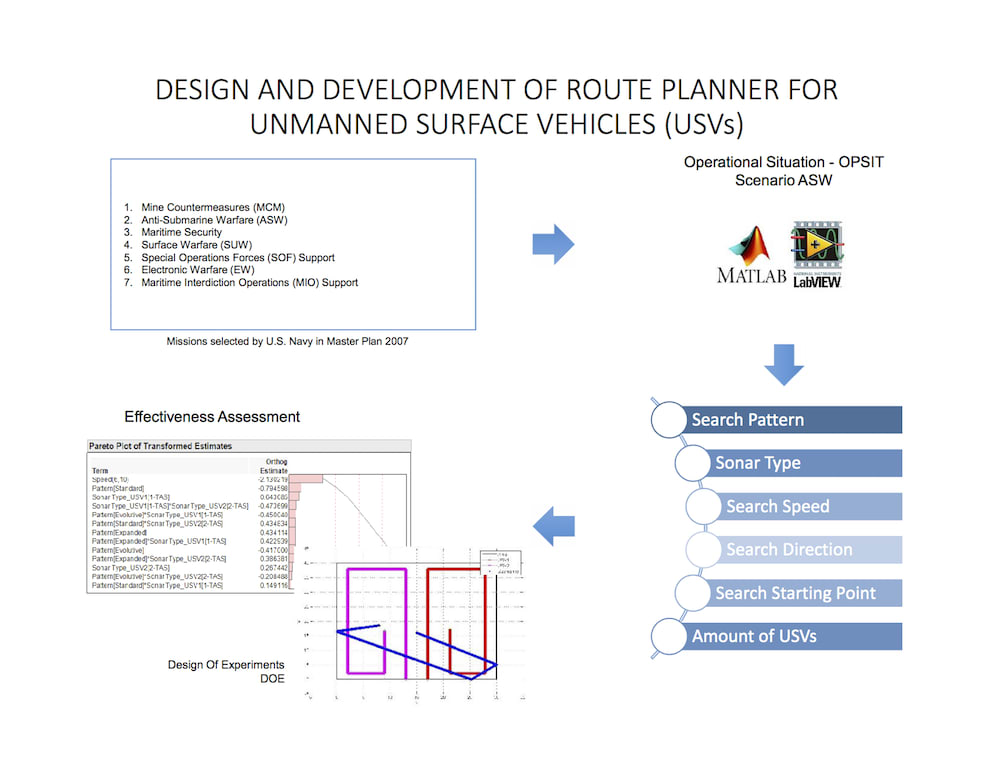



This project presents the development of an assessment module movement patterns used by unmanned surface vehicles – USVs, to provide support for naval operations. Also, it presents a methodology that integrates an Operational Situation (OPSIT) in order to evaluate different patterns and sensors used by these kind of vehicles to achieve an Anti-Submarine (ASW) mission.
This OPSIT, consists of probabilistic models and at the same time in physical and technical features of vehicles and their components. It is designed and programmed an algorithm simulation tools, Matlab and LabVIEW® where these models are integrated in order to evaluate and get results.
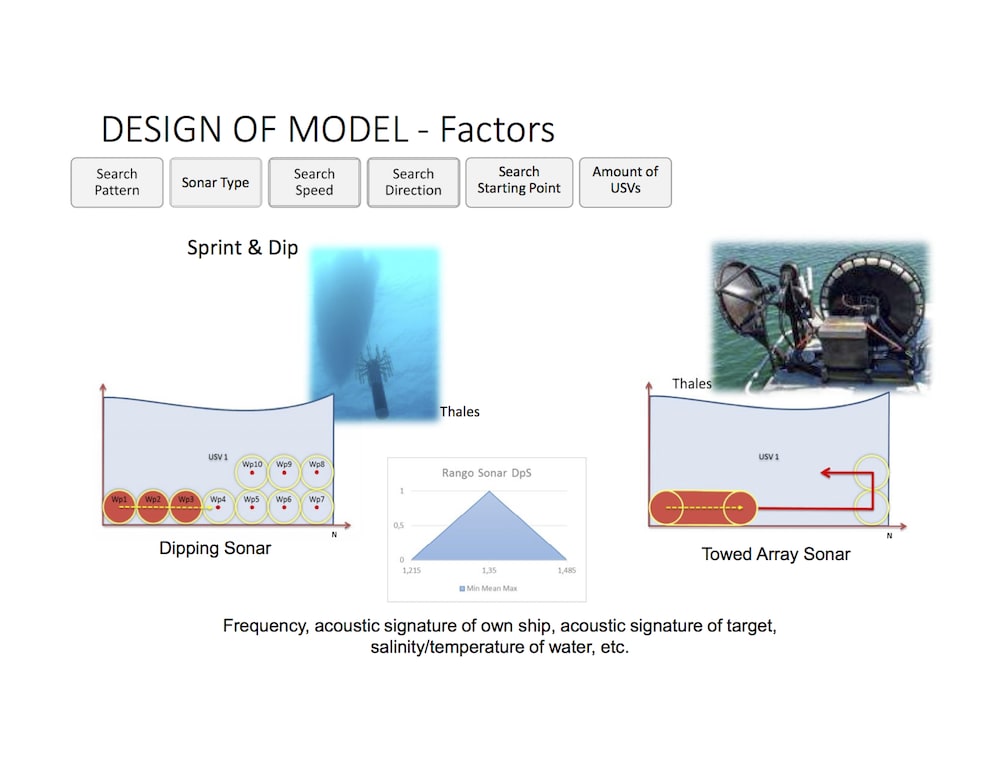
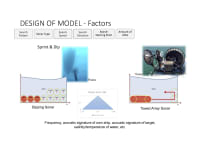
Subsequently the different constraints of the models are identified and formulates a design of experiments to establish the most significant factors influencing the stage. Also the impact of each of the variables in achieving the ASW mission is evaluated by means of a metric that combines the responses of the model in a measure of effectiveness.
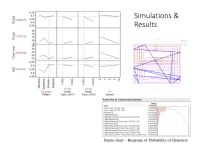
Additionally, a software LabVIEW® to simulate and assess the patterns line as described above is developed, thus obtaining statistical data and outputs that will support future USVs procurement decisions or assessment of USVs to fulfill develops an ASW mission using planned routes.
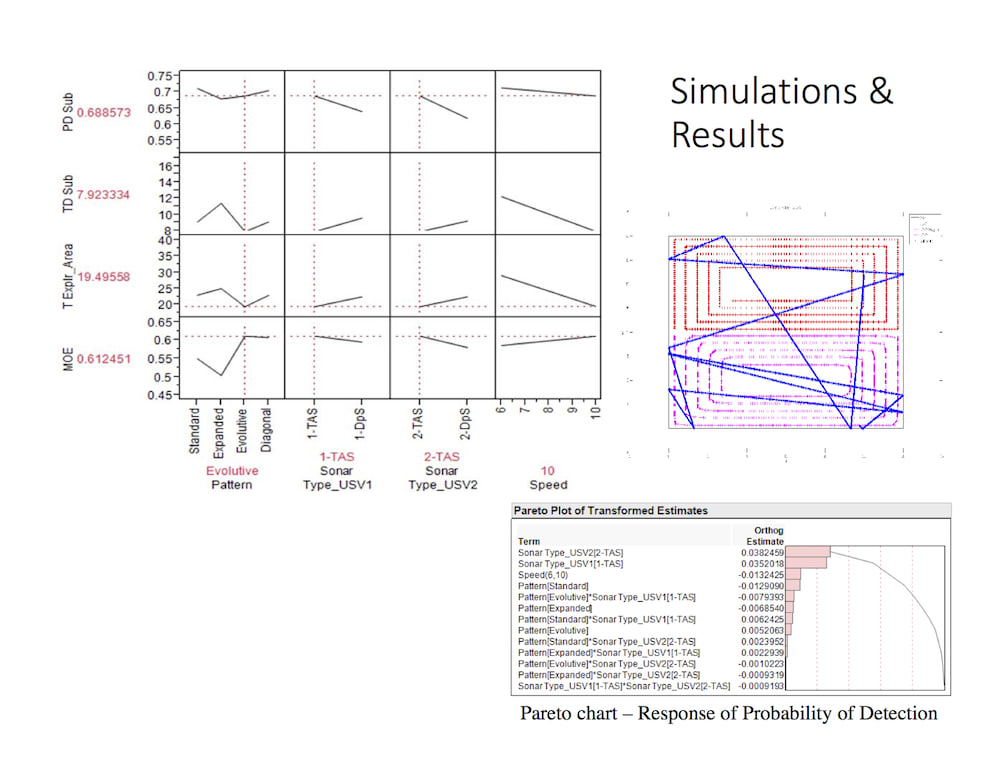
The responses of this evaluation indicates the result of the pattern that is most effective for an ASW mission; Evolutive. Also is evident, the variables that most affect the performance increase of the mission, such as the type of towed sonar array and the search pattern.
Video
Like this entry?
-
About the Entrant
- Name:Vladimir Diaz
- Type of entry:individual
- Software used for this entry:Labview, Matlab
- Patent status:none