







The entry presents the aerodynamic design, mechanical design and prototyping of a unique unmanned aerial platform. This platform is being developed in response to a perceived requirement for a more flexible surveillance and remote sensing platform than is currently available. Missions for such a platform include coastal surveillance, intelligence gathering by law enforcement agencies and environmental monitoring.
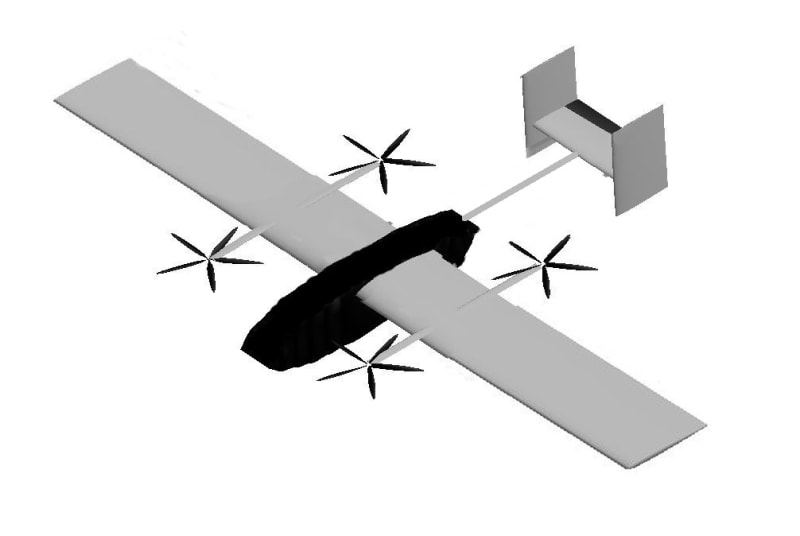
The design of the proposed platform consists of an electric powered quad tilt-rotor UAV that is capable of vertical takeoff and landing (VTOL) like a helicopter and long duration horizontal flight like an airplane. An optimal design procedure is conducted to satisfy a set of pre-determined requirements, which will ensure a competitive aerial platform performing primarily intelligence, surveillance and reconnaissance missions in UAV market. The design is optimized aerodynamically and mechanically to enhance the operational performance of the aerial vehicle. Both of these parameters have great importance for increasing efficiency, reaching the flight duration goals and achieving the desired tasks.
The aircraft has four electric motors with tilting capability in one axis, which gives it the ability to combine the vertical take-off and landing capabilities with long endurance and optimum cruise speed.
The CAD model of conceptually designed UAV is prepared using CATIA software. The UAV’s aerodynamic coefficients, stability parameters and structural analysis are evaluated using ANSYS. A mathematical model is developed which calculates all of the weight estimation parameters, performance outputs, generation of different design cases using this mathematical model and the procedure for an optimal design choice of the aircraft.
The prototype is constructed using Styrofoam and strength is enhanced using balsa, nylon based composite fabric and epoxy. The aircraft uses four BLDC motors powered by a 4-cell LIPO battery. The aircraft uses commercially available ArduPilot Mega 2.8 board for achieving a semi-autonomous flight. The UAV is capable of flying a pre-defined mission using GPS waypoints. It also features a "return to launch" mode which automatically flies the UAV back to its launch position using GPS.
Like this entry?
-
About the Entrant
- Name:Tayyab Malik
- Type of entry:teamTeam members:Tayyab Malik
Ali Murtaza - Software used for this entry:CATIA , Ansys , Fluent , ArduPilot Mega 2.8
- Patent status:none