
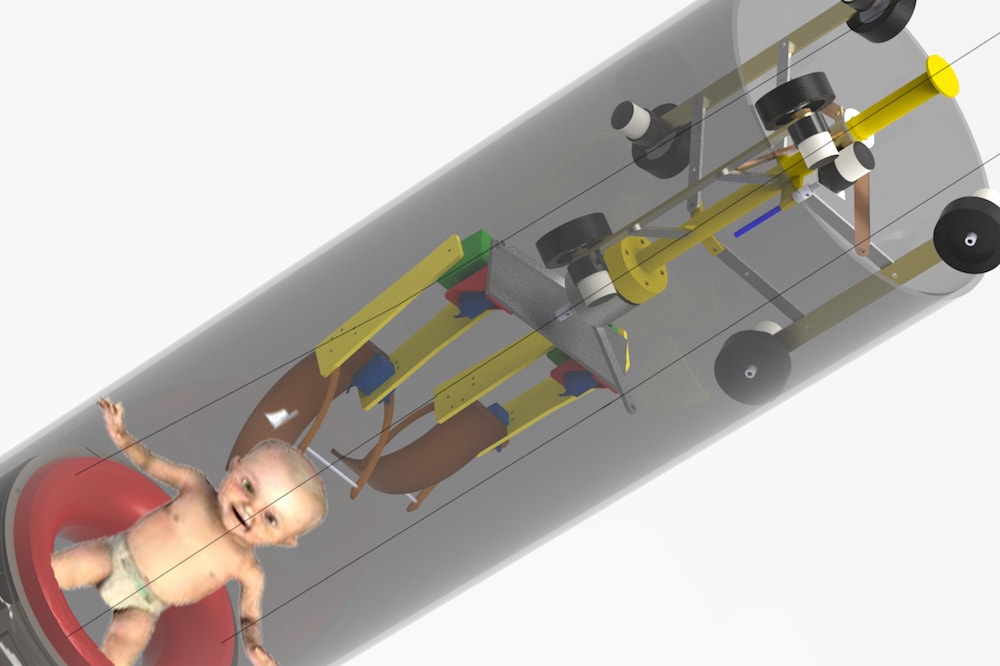





The main objective of the proposed system is to rescue the infants who accidentally fall into the bore well due to improper maintenance at the digging spot. The proposed system is a robot which can crawl into the bore well and lift the infant from the well with the help of two 3DOF robotic arm which is controlled by gesture which is termed to be called as “shadow control technology” in the system and the robot get a human touch in its control by this technology and reduces operation time. This also helps to rescue the infant from any orientation they are present. The robot can also be used in applications like scavenger cleaning and pipe inspection with some minor changes in the end effectors.
Video
Like this entry?
-
About the Entrant
- Name:Harikrishnan M
- Type of entry:teamTeam members:HARIKRISHNAN.M
HARISH.A
NAVEEN.N
ARUN.K - Software used for this entry:SOLIDWORKS
- Patent status:pending