






Gesture recognition has a goal of interpreting human gestures that can originate from any bodily motion or state but commonly originate from the face or hand. It helps in building bridge between machines and humans than primitive text user interfaces or even GUIs (graphical user interfaces), which limits the majority of input to keyboard and mouse.
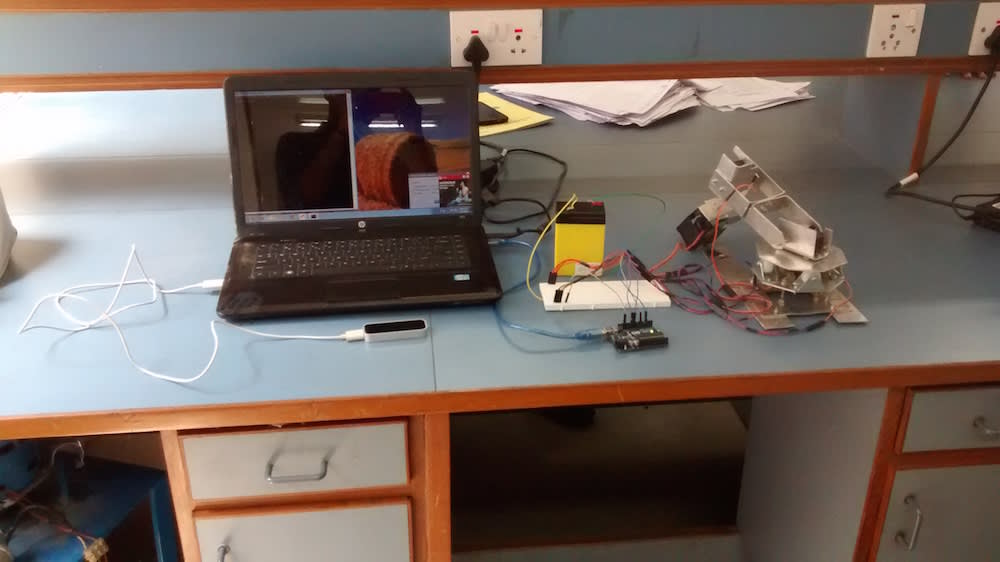
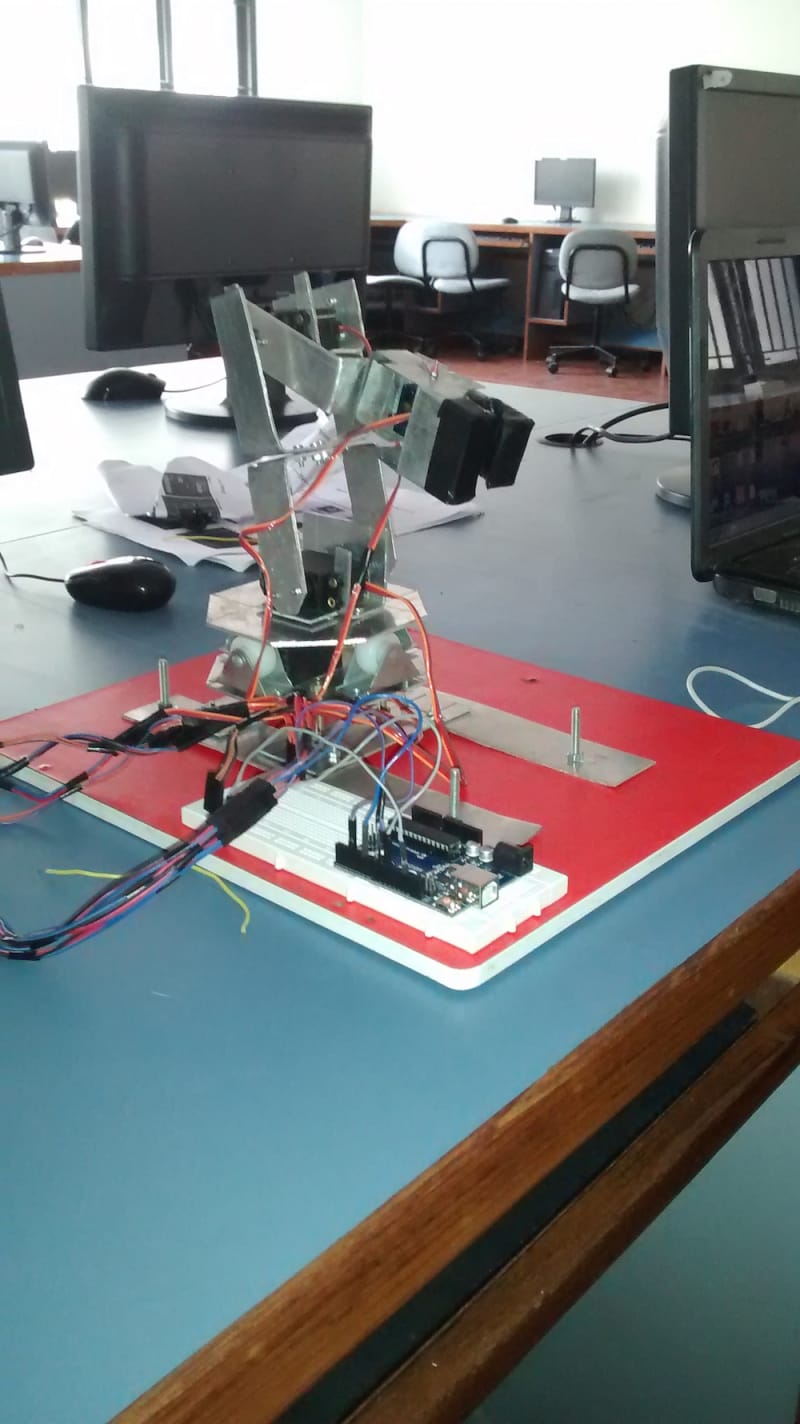
The project deals with the design and fabrication of a gesture controlled robotic arm. The robotic arm is operated & controlled wirelessly with the help of hand gestures, which transmits signals to the robotic arm through a Leap Motion device rather than controlling it manually through a conventional remote controller. The Leap Motion controller is a small USB peripheral device consisting of two monochromatic IR cameras and three infrared LEDs. The device observes the hand gestures and send the signals to the host computer through the USB cable, where it is then analyzed by node.js software. Finally the output signals are generated to arduino microcontroller, which in turn controls the servo motors and the desired movement of robotic arm is thus obtained. Robotic arm are ideal for use in hazardous environments by removing people from direct exposure to unfriendly conditions such as materials that are radioactive or highly explosive.
The main objective of this work was to design, develop and implement a competitively robot arm with enhanced control and stumpy cost. The robot arm was designed with four degrees of freedom and talented to accomplish accurately simple tasks, such as light material handling, which will be integrated into a mobile platform that serves as an assistant for industrial workforce. The robot arm is equipped with several servo motors which do links between arms and perform arm movements. The robotic arm is operated & controlled wirelessly with the help of hand gestures, which transmits signals to the robotic arm through leap motion device rather than controlling it manually through a conventional remote controller. It communicates with the system using node.js software and, which performs inverse kinematic calculations and communicates the proper angles serially to a microcontroller that drives the servo motors with the capability of modifying position, speed and acceleration.
Like this entry?
-
About the Entrant
- Name:Arun Kumar
- Type of entry:teamTeam members:N.ARUN KUMAR
M.N.NARESH KUMAR
B.NAGAMANICKAM
S.NIZAM - Patent status:none