



NASA’s Langley Research Center offers a novel lifting and precision positioning device with hybrid functional characteristics of both crane-type lifting devices and robotic manipulators. The design of the Lunar Surface Manipulation System (LSMS) allows for fine positioning with complete control over both translation and rotation of the payload. In addition, the design permits several other operations using a wide variety of special purpose tools, such as a bucket, pallet forks, grappling devices, sensor and visualization packages, and dexterous robotic arms that can be quickly added to the tip. NASA is seeking development partners and potential licensees.
NASA Langley developed the LSMS because of the need for a versatile system capable of performing multiple functions on the lunar surface, such as unloading components from a lander, transporting components to an operational site and installing them, and supporting service and replacement during component life. Current devices used for in-space operations are designed to work on orbit (zero g) only and thus do not have sufficient strength to operate on planetary surfaces. Traditional cranes are specialized to the task of lifting and are not capable of manipulator-type positioning operations.
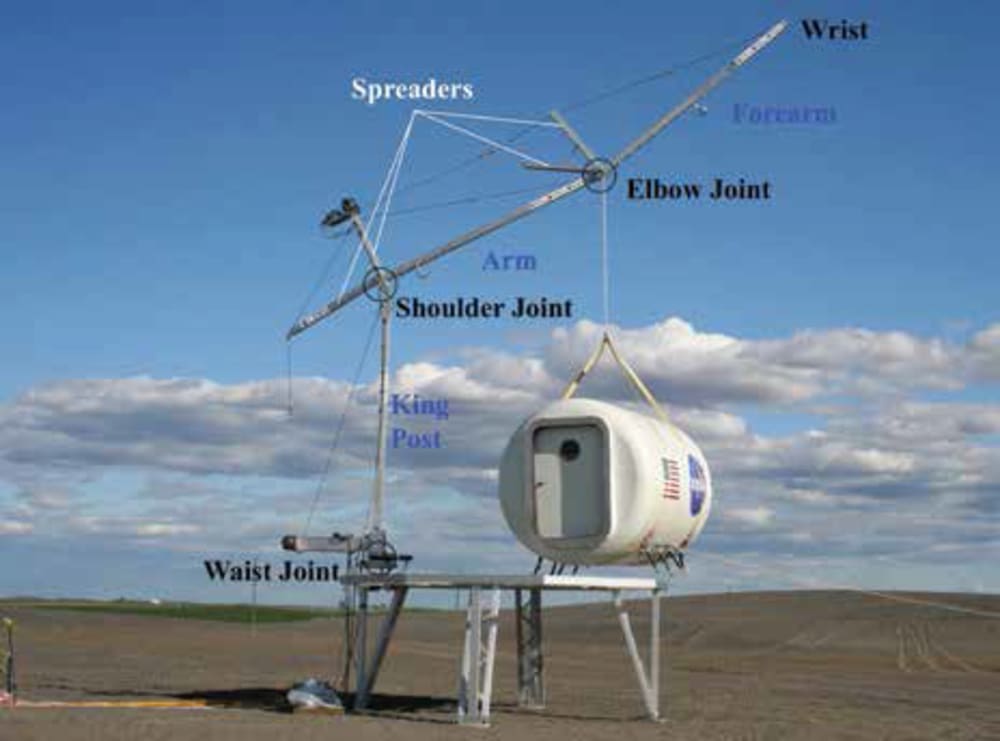
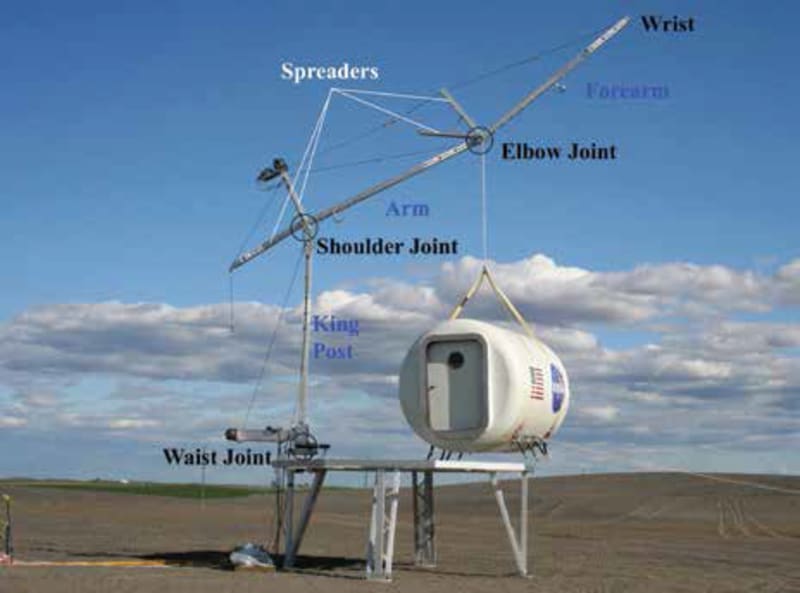
The innovations incorporated into the LSMS allow it to lower payloads to the ground over a significant portion of the workspace without use of a hoist, functioning like a robot manipulator, thus providing a rigid connection and very precise control of the payload. The LSMS uses a truss architecture with pure compression and tension members to achieve a lightweight design. The innovation of using multiple spreaders (like spokes in a wheel) allows the LSMS to maintain its high structural efficiency throughout its full range of motion. Rod portions of the tension members automatically lift off and re-engage the spreaders as the joint articulates, allowing a large range of motion while maintaining mechanical advantage. In addition, the LSMS uses a quick-change device at the tip end that enables automated acquisition of end effectors or special purpose tools to increase its versatility.
Video
Like this entry?
-
About the Entrant
- Name:Kathy Dezern
- Type of entry:individual
- Patent status:patented