




Problem area
During imprinting of patterns from a stamp onto a substrate surface, conformal contact is necessary to ensure that pattern transfer is successful over the entire stamp. However, such contact is hindered by the initial angular misalignment between the surfaces. In real systems, this misalignment is inevitable and arises due to the two surfaces being non-parallel. Thus, alignment systems that can orient the surfaces parallel to each other while bringing them in contact are necessary during imprinting. The purpose of the present system is to provide this functionality via an easy-to-manufacture, low-cost, and passive system.
Design challenge: Cost versus performance tradeoff
Current alignment systems are of two types: (i) active systems that use feedback control and (ii) manual techniques that rely on the deformability of a soft stamp. These lie at the two extremes of the cost versus performance tradeoff. For micro/nano imprinting, expensive active systems are a barrier to entry for small businesses and academic laboratories; whereas, manual techniques are inappropriate for imprinting fragile features because conformal contact is achieved by “squishing” the features. Thus, there is a technology gap that can be filled by developing high-performance and low-cost alignment systems.
Innovation: Breaking cost versus performance tradeoff
We have broken the tradeoff by abandoning the conventional design paradigm that relies on feedback motion control. Instead, we have developed an alternate strategy wherein alignment is achieved via kinematics, i.e., by forcing the surfaces to move along deterministic paths that are enforced by physical geometric constraints. This strategy (i) eliminates expensive sensors, (ii) reduces the number of actuators by a factor of 3, and (iii) enables using low-performance actuators to achieve the same alignment. In combination, these factors reduce the cost by at least 100 times without sacrificing alignment accuracy.
Technology description
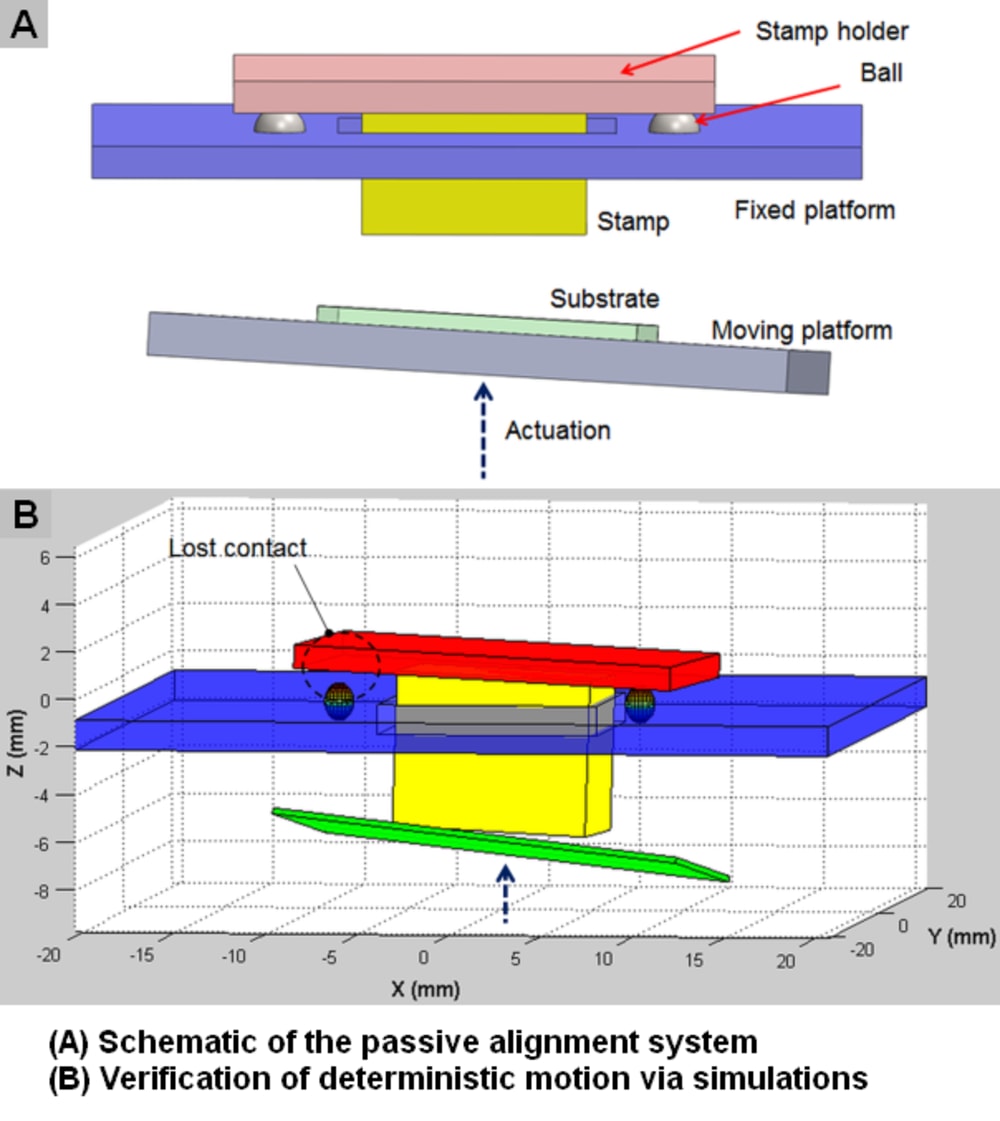
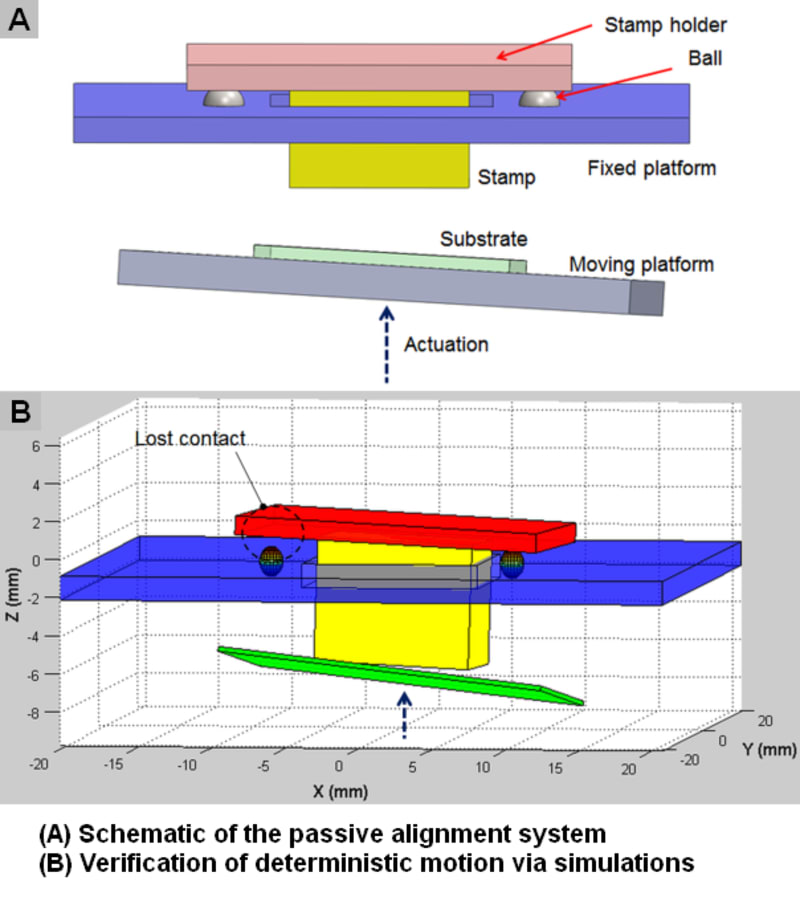
In this system, kinematic constraints are implemented by supporting the stamp on a set of three smooth spherical balls. When the misaligned bottom surface is moved up towards the stamp, the stamp first loses contact with one ball and gradually comes into contact with the substrate along an edge. With further actuation, the stamp loses contact with the second ball and then the third ball, whereby the stamp then “sits” entirely on top of the substrate. As the alignment process is decoupled from the contact force, fragile features can be imprinted by independently tuning the contact force to infinitesimally small values.
Manufacturing and marketability
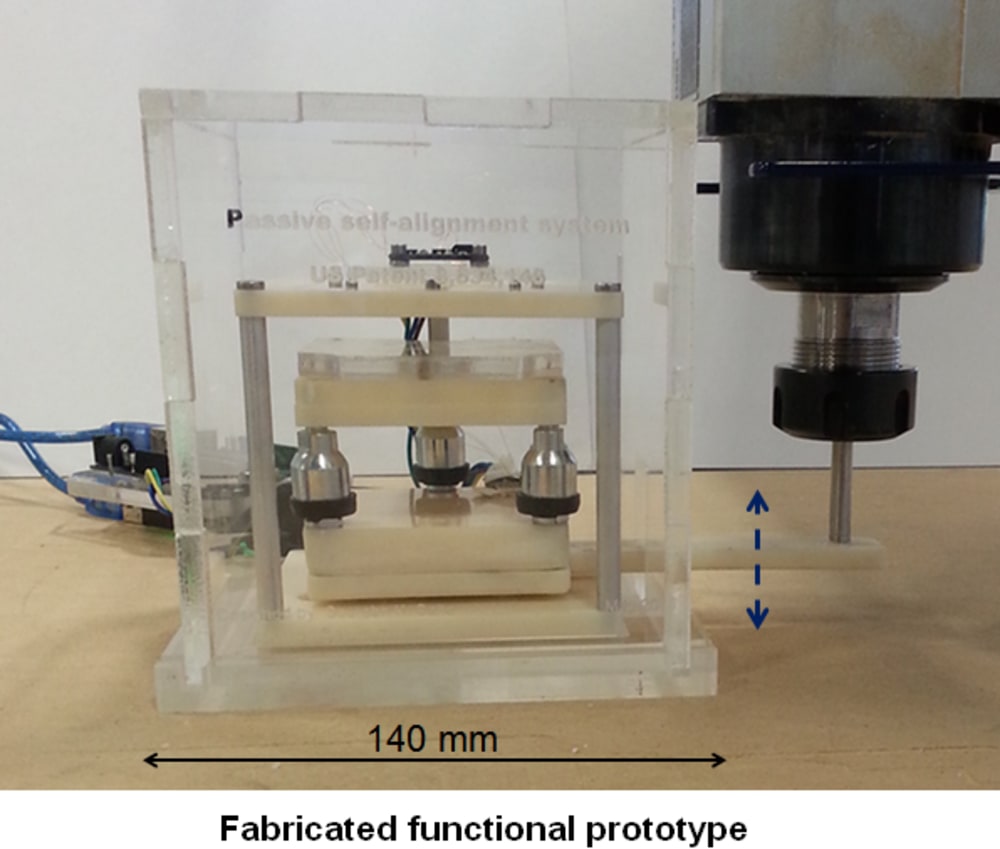
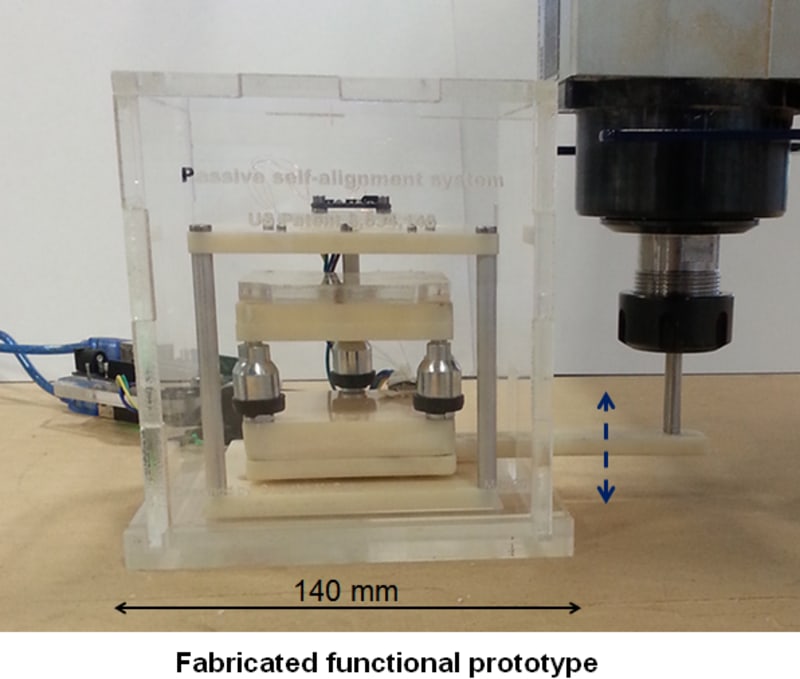
A working prototype of this system has been fabricated at a cost of $350 in a hobby machine shop; an equivalent commercial system costs ~$30,000. With production scale-up, the price can be further reduced to $200. This price range will create two distinct high-volume markets beyond the existing market for precision stages: (i) low-cost scientific instrumentation and (ii) hobby tools. As such, this alignment system will enable extending today’s ‘Makers Revolution’ to the micro/nano scale by eliminating a barrier to entry for small businesses and individual inventors.
Like this entry?
-
About the Entrant
- Name:Sourabh Saha
- Type of entry:individual
- Software used for this entry:MATLAB, SolidWorks
- Patent status:patented