





Growing population of older adults wants to live independent life style in their homes or senior communities. While older people can look out for each other, they cannot help much when one of them falls on the floor except to make a phone call. Some people lose their balance and fall more often causing numerous calls to response centers every year.
There are senior assisting services that dispatch personnel to help. In other cases, fire departments are called in to help the elderly but they might have other priorities at the same time.
The purpose of Semi-Autonomous Personal Assistant is to mitigate this situation with providing the following:
- Detect a fall by person wearing a motion sensor and automatically move into position to assist the fallen person in getting up.
- Respond to voice command from the person calling for help and position itself for assisting in getting up.
- Initiate emergency alert about the fall and provide visual and sound communication channel for assesing the situation and providing additional help remotely.
Components comprising SAPA:
- Mechanism to move the machine into position for assistance.
- Electronics to control all aspects of local and remote machine operations.
- Energy storage: rechargeable batteries and optional compressed air canister.
- Mast to provide a handle for pulling oneself up, support remotely controlled camera, microphone, and other electronics for navigating machine.
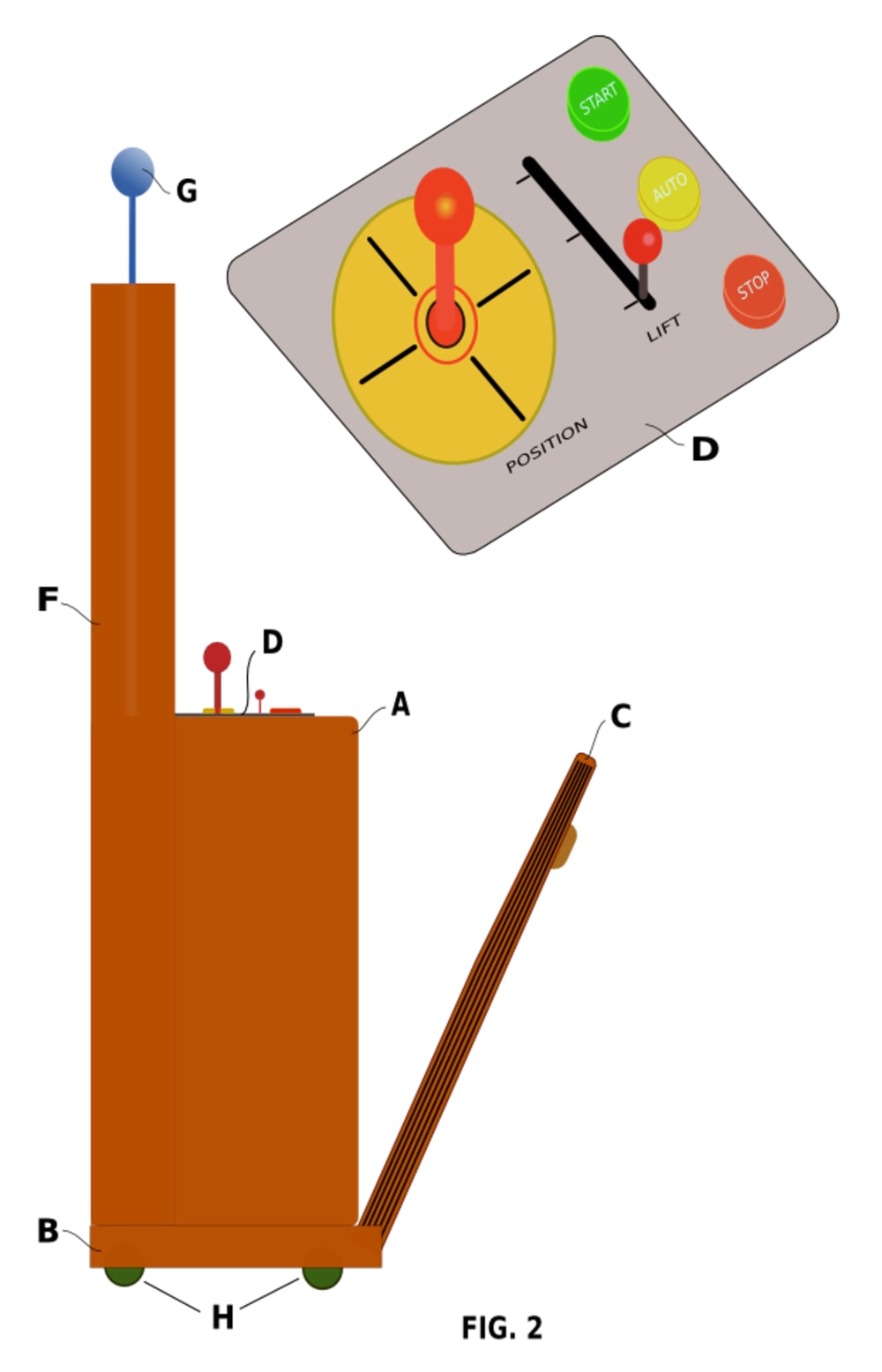
- Console with joystick for positioning machine manually, lever for activating body lift, and status indicators.
- Optional provision for a robotic arm for extending machine capabilities, reminder and dispenser for medication, robotic arm for rehabilitation exercise, etc.
Different mechanical solutions could be used for the lifting mechanism depending on the person weight: hydraulic, scissor lift, compressed gas; all with adjustments for the weight of the person to be lifted.
SAPA use scenarios:
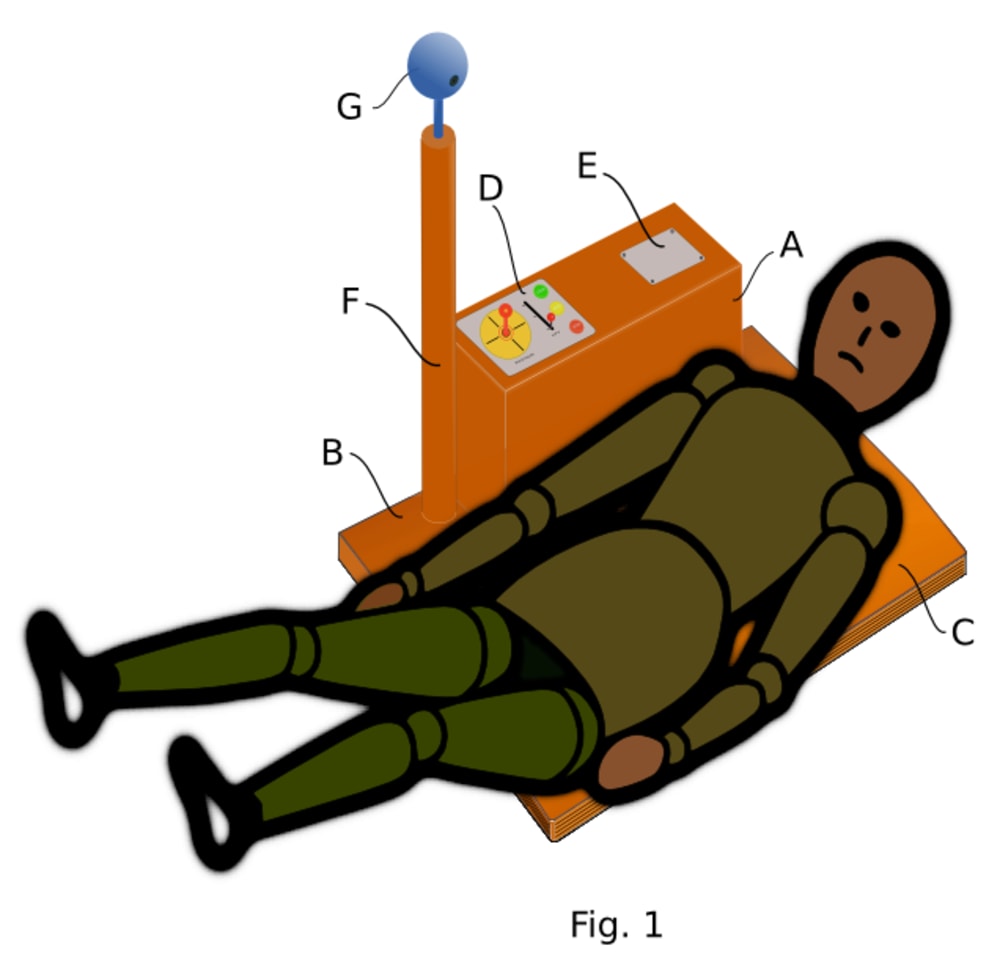
- Machine working in Auto mode would move close to the person on the floor, lower the lift mechanism so that person could roll onto it as shown in Fig. 1 or lean over lifting mechanism with upper body and then give the command for lifting. When lifted high enough the person would reposition into sitting position with grabbing the pole and get up.
- SAPA calls assistance center which can assess the situation remotely using camera and microphone to communicate with person on the floor and possibly assists them with controlling the SAPA and it's mechanism remotely.
- Another person uses manual control to direct SAPA into position to lift the person from the floor.
Description of the drawings:
Fig. 1-A Semi-autonomous Personal Assistant
Fig. 1-B SAPA base with wheels
Fig. 1-C SAPA platform with lifting mechanism
Fig. 1-D Console to control SAPA position and lifting manually
Fig. 1-E Connection for robotic arm or other options
Fig. 1-F Pole
Fig. 1-G Camera, microphone, and navigational electronics
Fig. 2 SAPA side view with partially released lifting mechanism and detailed Console view.
Fig. 2-H wheels.
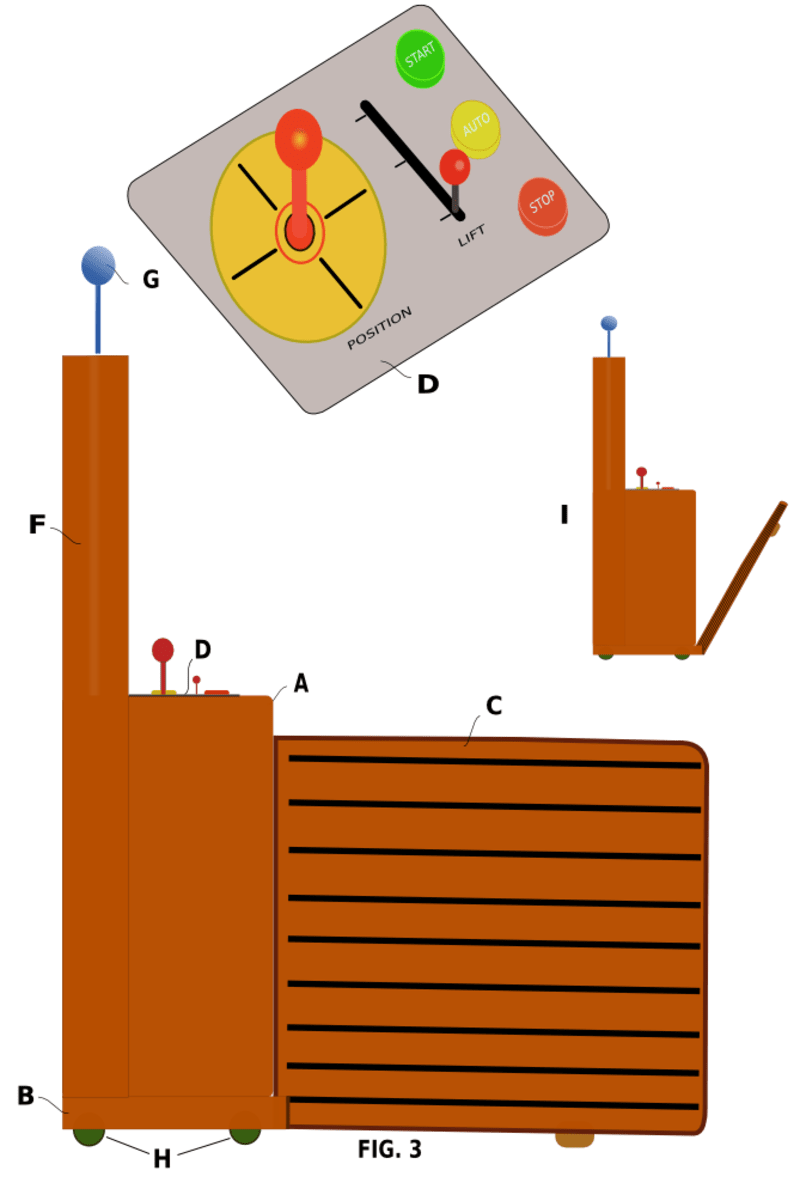
Fig. 3 SAPA side view with fully activated lifting mechanism
Like this entry?
-
About the Entrant
- Name:Rafael Skodlar
- Type of entry:individual
- Software used for this entry:Inkscape
- Patent status:none