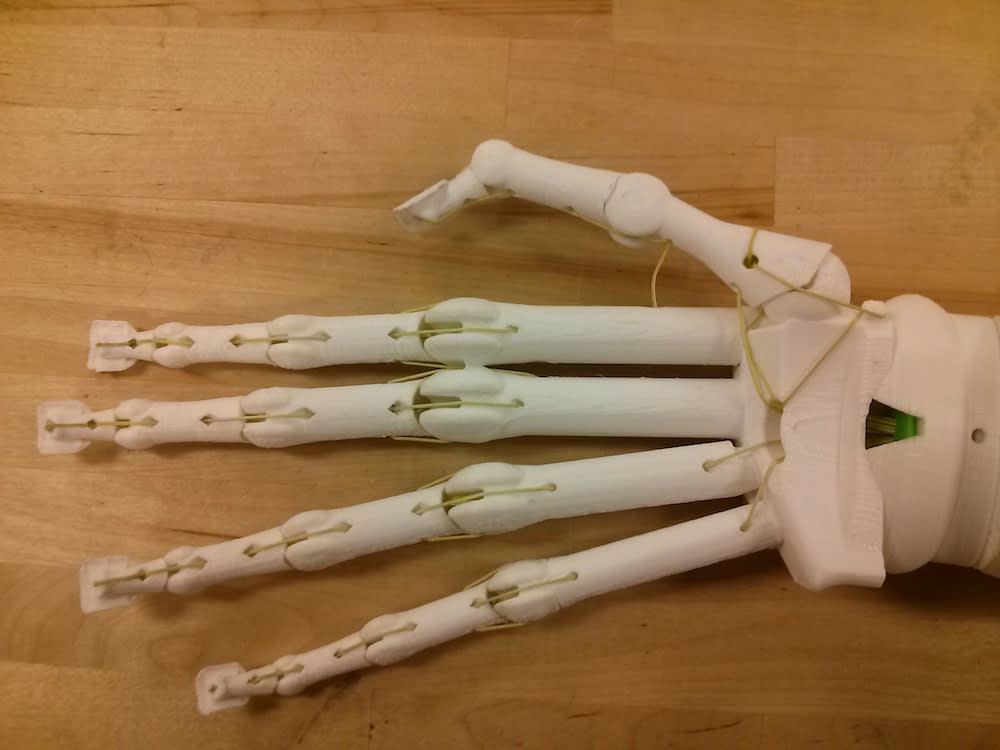







To this day amputees have often relied on hooks due to prosthetic hands being too easily damaged during work; however this design can change that. By modeling it directly after the bones, ligaments, and tendons in the human hand our design has become nearly indestructible under normal conditions. With this many amputees may finally regain the ability to work efficiently.
The robotic hand’s assembly is held together with cords running down the center of each bone, and cords on the outside of the joints to control movement. The rope then can be fed into any control system desired. The current design makes use of the open source Inmoov arm, though traditional prosthetics could be used. Also as these are just the bones personalized padding can be added.
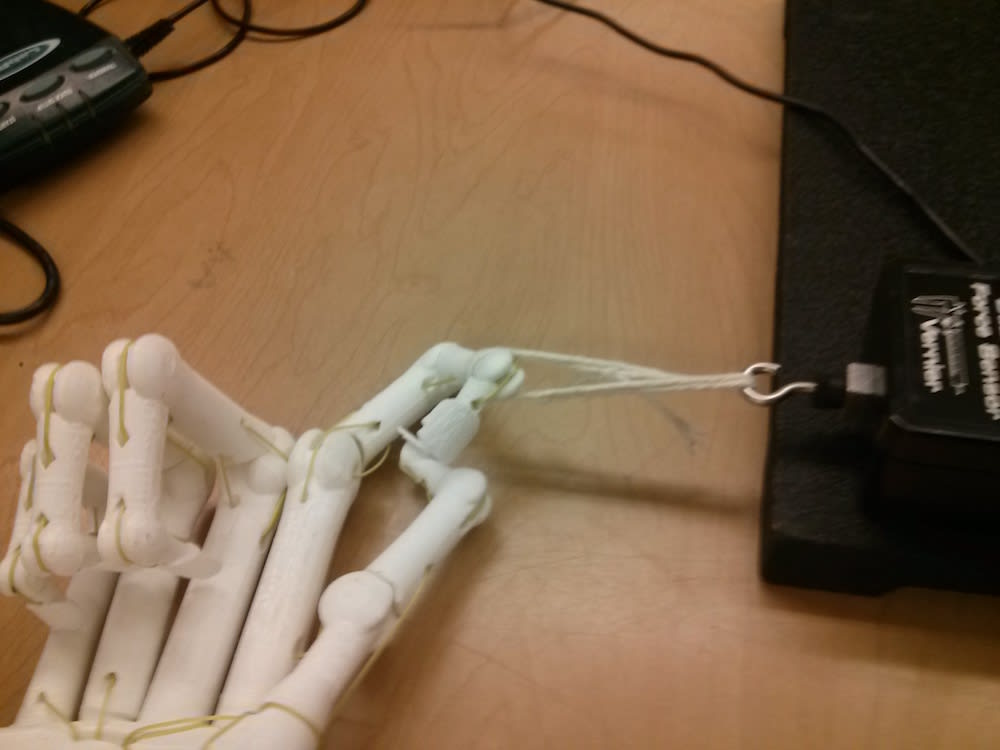
With this design if a member would undergo a force capable of breaking it the joint dislocates, storing the energy as tensile and compression forces in the cord and bone respectively. Then when the member is able to return to its original position the tensile and compression force is used to do so. The primary concern with this design was if the fingers will dislocate in response to loading such as lifting heavy items. To test this we used Tennessee Tech’s measurements lab to test the amount of force required to dislocate the fingers in damaging and load bearing orientations. It was found that while to avoid damage 10 N on the finger was needed to twist the index out of position, it took 50 N of force to partially uncurl it when grasping. Proper loading did not dislocate the bones nor did the hand release the cord during testing. With this data it is apparent that if the hand would be damaged it will instead dislocate, though if no damaging input is given the hand can support very heavy loading.
To get this to design to market two key properties can be used. The first is the fact that the FDA has chosen not to monitor 3D printed prosthetics. Because of this development kits can be printed and sold to high schools and universities as STEM initiatives in prosthetic development. And secondly due to the fact that additive manufacturing is capable of making custom individual production runs the kits can be made to order without great cost. Manufacture takes about ten dollars for a basic hand, while including servos and peripherals costs $150. It is with these two properties the hand can have immediate success in the market while designs are being finished and tested.
With this design a robotic hand may be constructed that is durable enough for real world application in prosthetics. With its joints it is able to store the energy from heavy abuse without breaking. Also with this business plan the design can reach many without great financial risk. It is with this that it is finally possible to completely recreate a basic human hand, and with it gaining many new tasks the field of robotics may aid.
Video
Like this entry?
-
About the Entrant
- Name:Micah Hardyman
- Type of entry:teamTeam members:Micah Hardyman Jonathan Zigler Adam DeMoss
- Software used for this entry:Inventor
- Patent status:none