





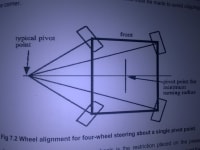
Aim- To increase the corner stability (at a time line change on the road), reduce the turning radius of vehicle.
Purpose- Parking vehicle inside small space and take a turn in small radius
Brief- Mostly vehicle are controlling via front two wheels but in my project the rear wheel will be equally responsible in steering system. In which is created two situations:
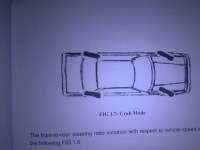
1- Rear wheel turns in opposite direction of front wheel at an angle of front wheel from the straight position of wheel. Result: decrease the turning radius of vehicle and park in small space.
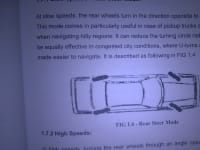
2- Rear wheel turns in same direction of front wheel and makes same angle of front wheel front the straight position of wheel. Result: more corner stability at a time of line changing and overtaking any vehicle at high speed.
Like this entry?
-
About the Entrant
- Name:Mohit Kumar
- Type of entry:individual
- Software used for this entry:solid Works
- Patent status:pending