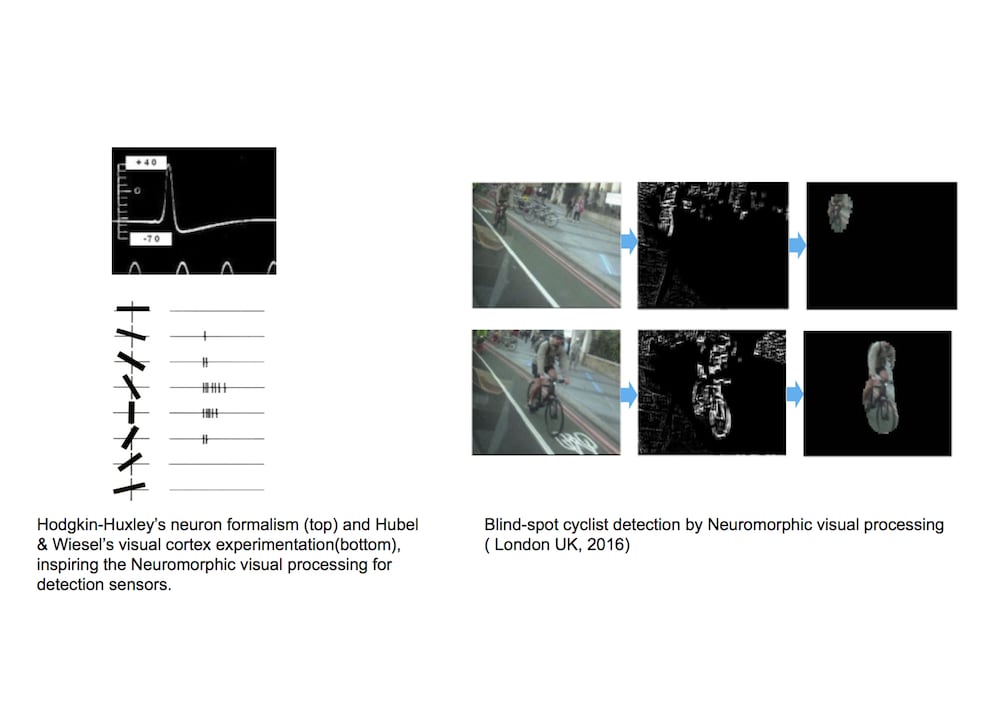


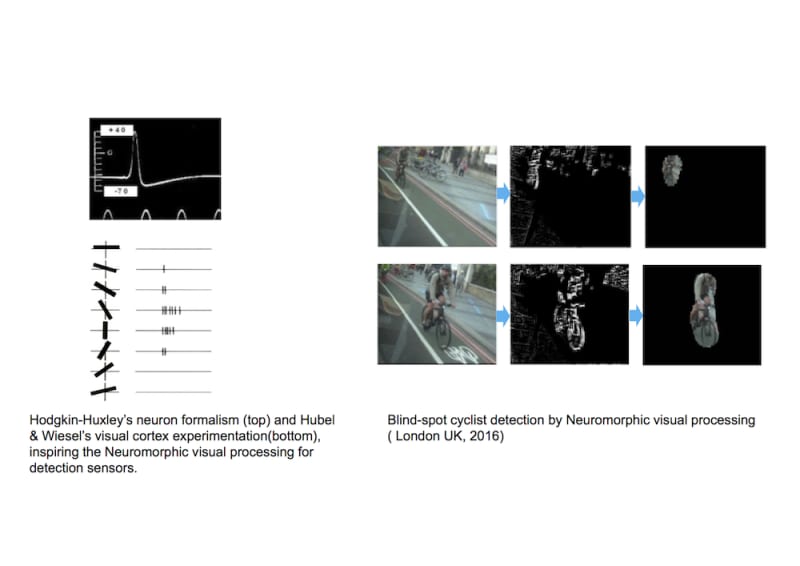
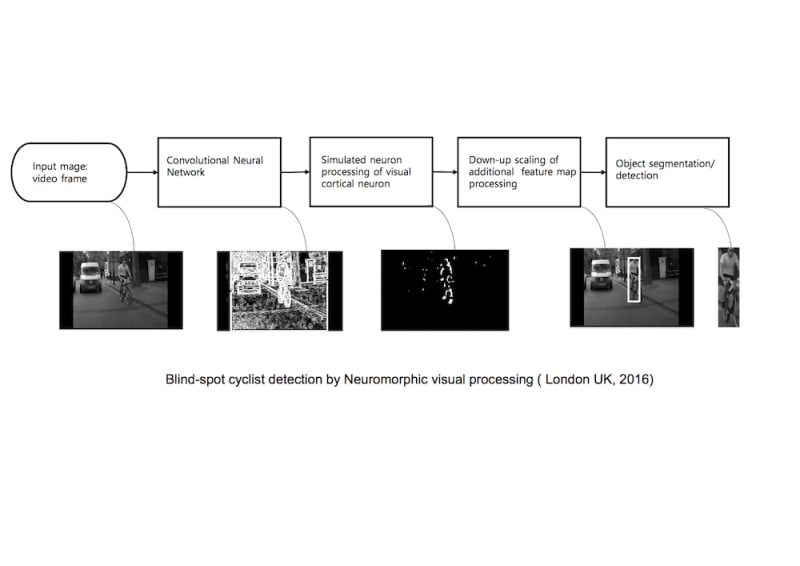



There have been many innovative products developed on the subject of object recognition for the purpose of automotive safety – be it vulnerable road user detection or improving autonomous driving. These works were based on researchers making use of diverse methodologies of complex vision algorithms or complicated sensors. However, despite its effectiveness, the advanced products or computer vision algorithms sometimes lack the robustness of mammalian visual system for the application in dynamic environments present in vehicle driving conditions, as demonstrated by the recent accidents involving autonomous driving vehicles. On the other hand, concerns about vulnerable road users’ (VRU) safety has becomes a serious issue, supported by 49% of traffic accident death being VRU. In particular, with the growing number of cycle users in the developed world, cyclists’ safety has become a focus in many developed nations. It is known that certain scenarios such as the nearside blind-spot are more prone to the accident, while adverse lighting and weather condition are also contributory towards accidents. The new design approach of the Neuromorphic visual processing offers an effective alternative solution, which replicates the performance of mammalian Visual Cortex, based on Hubel and Wiesel’s experimentation and Hodgkin-Huxley formalism. The Neuromorphic visual processing incorporates Deep Neural Network, combining Convolutional Neural Network and simulated neurons. And through the unique post-processing, Neuromorphic processing delivers the reinforced accuracy in adverse environments.
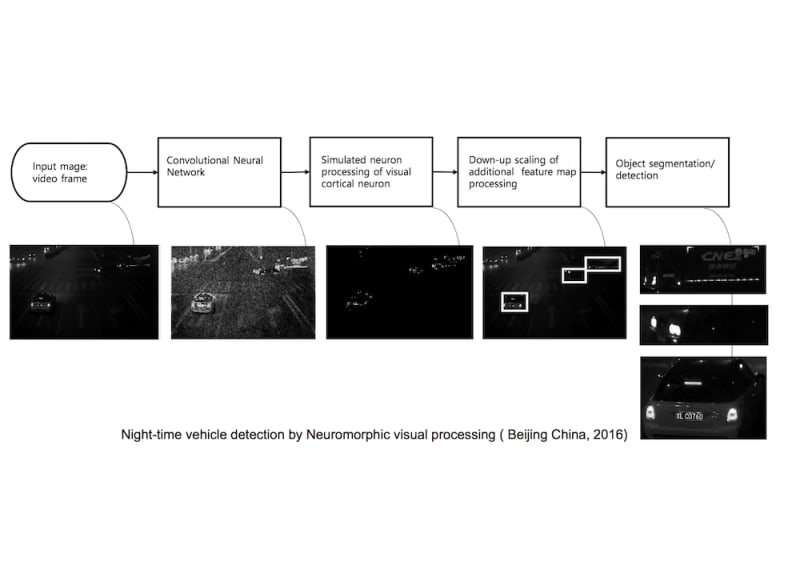
The robust performance under the limited sight environment of nature is observed during the evaluation of early prototype, as illustrated by the results of three example cases. The bio-inspired Neuromorphic visual sensor is also applicable to the security enhancement, as demonstrated by detecting the night-time vehicle detection without requiring complex training procedure. The solution demonstrated detection of cyclist and pedestrian detection under various road conditions from the car and the bus.
The proposed Neuromorphic processing can be available as a new Neuromorphic computing platform in various implementation methods including a cost-effective VLSI ASIC or GPU, which can be integrated even as part of the sensor. One of the working prototypes is evaluated for the real-time Neuromorphic visual processing using GPU technology (NVDIA’s Jetson-TX1).
The bio-inspired artificial intelligence of Neuromorphic visual processing offers a variety of application opportunities – from road safety for cyclists and pedestrians to safer and reliable autonomous driving, with the eligible manufacturing methodology depending on the business environments or social requirements.
Like this entry?
-
About the Entrant
- Name:Il Song Han
- Type of entry:teamTeam members:Woo-Sup Phil Han ODIGA Ltd, LONDON, UK
- Software used for this entry:MATLAB, Python, VHDL
- Patent status:pending