






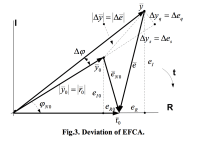
Proposed a control system with feedback that defines deviations of magnitude and phase delay of plant output. We used the Hilbert transform for calculated an arbitrary input and output of a plant as analytical signals and the deviation of the phase delay between them at violated of steady-state. Further, used a calculated deviation of the phase delay, we defined a non-analytical error function of complex argument (EFCA), whereas complex argument used an output of a plant. The control input of a plant finding as a real-valued functional of a complex output of a plant using a Wirtinger derivation.
Like this entry?
-
About the Entrant
- Name:Oleg Agamalov
- Type of entry:individual
- Software used for this entry:Yes
- Patent status:patented