
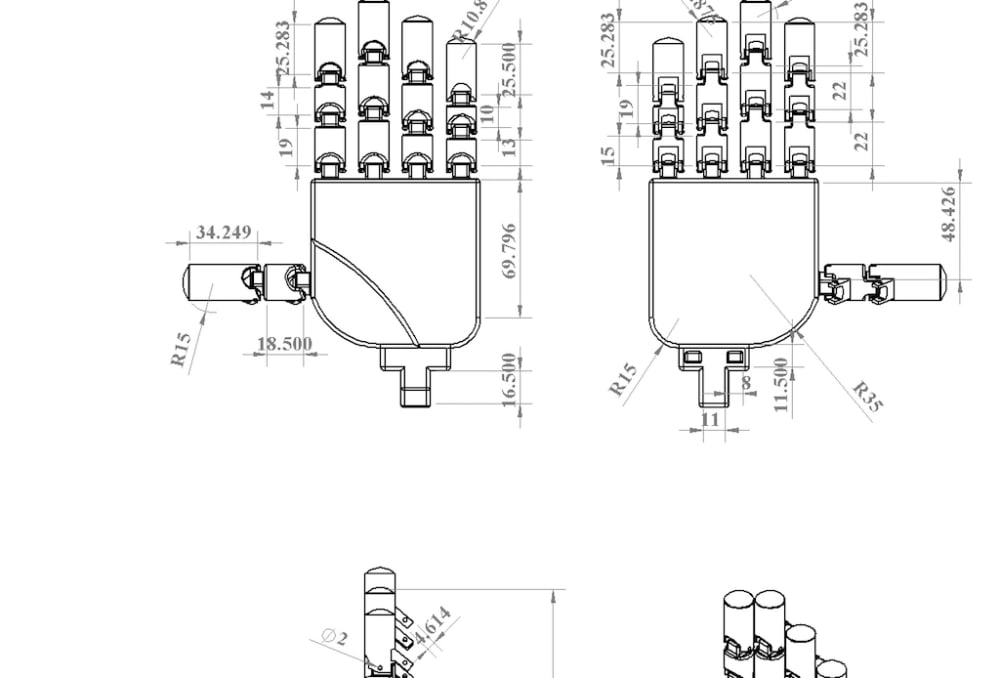
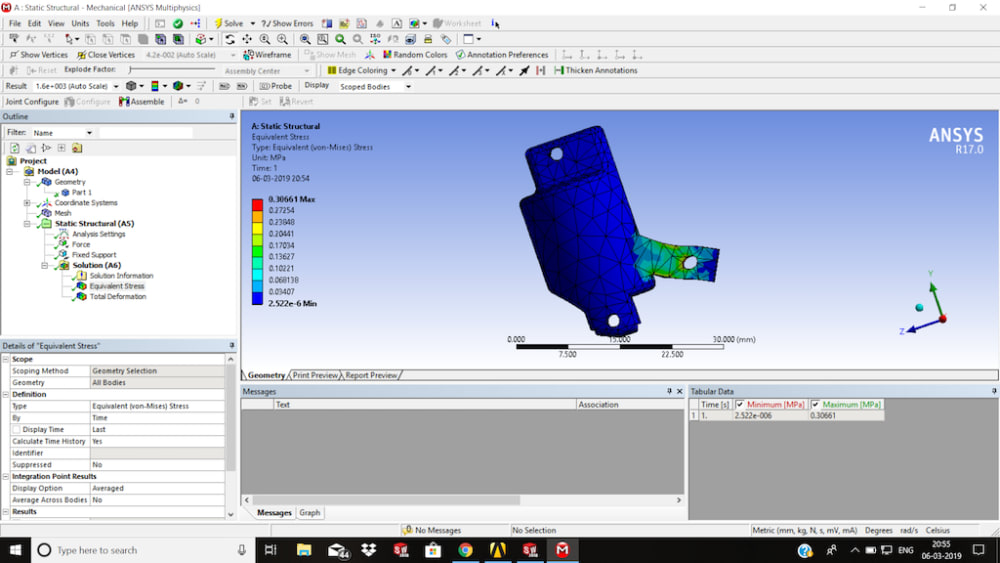

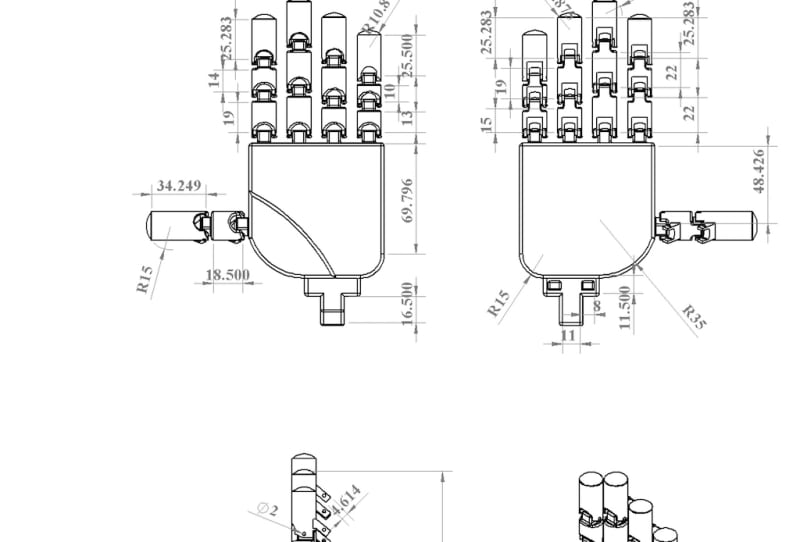
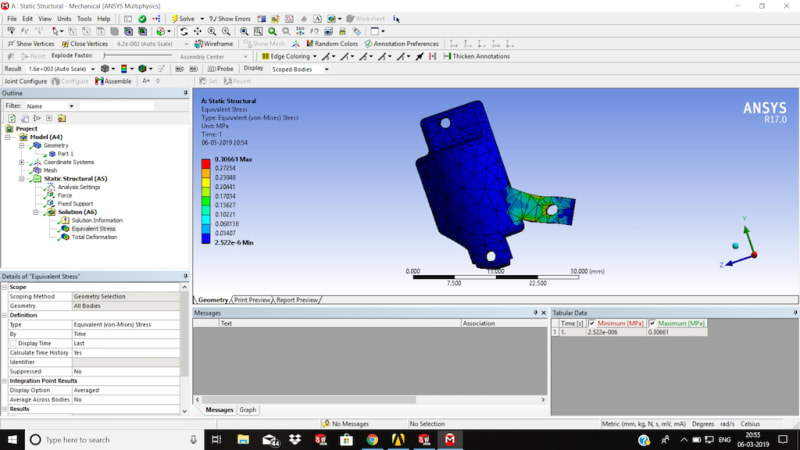

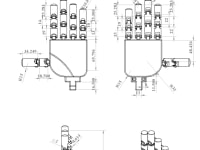
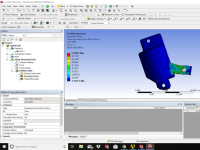
Design of user-friendly gripper to grasp both symmetrical and non-symmetrical complex geometrical objects. The proposed design is modeled, analyzed and simulated using Solidworks and Ansys software. The fabrication of the gripper should be using 3D printing technology with PLA. The operation and control will be carried out by using PLC, Pi boards and pneumatic technologies which enables gesture control, programming control and wireless control. The fabricated gripper will be tested with different objects for different applications. Performance results are properly validated by conducting different experiment trials.
Like this entry?
-
About the Entrant
- Name:Kannan V
- Type of entry:teamTeam members:V.Kannan
T.Karthik@Siva - Patent status:none