



Our objective is to help firefighters by making a group of autonomous bots, which will reduce their dangerous work by autonomously assessing the forest area in the event of a forest fire and providing the information to a centralized database. Also, it stops or prevents large fires by identifying them at the early stage and putting them out. The main goal of our project is to create any-terrain rovers to carry payloads like sensors for assessing conditions, upload all the data to a server for firefighters. This project is primarily used in forests to predict, prevent and extinguish forest fires in a very early state.
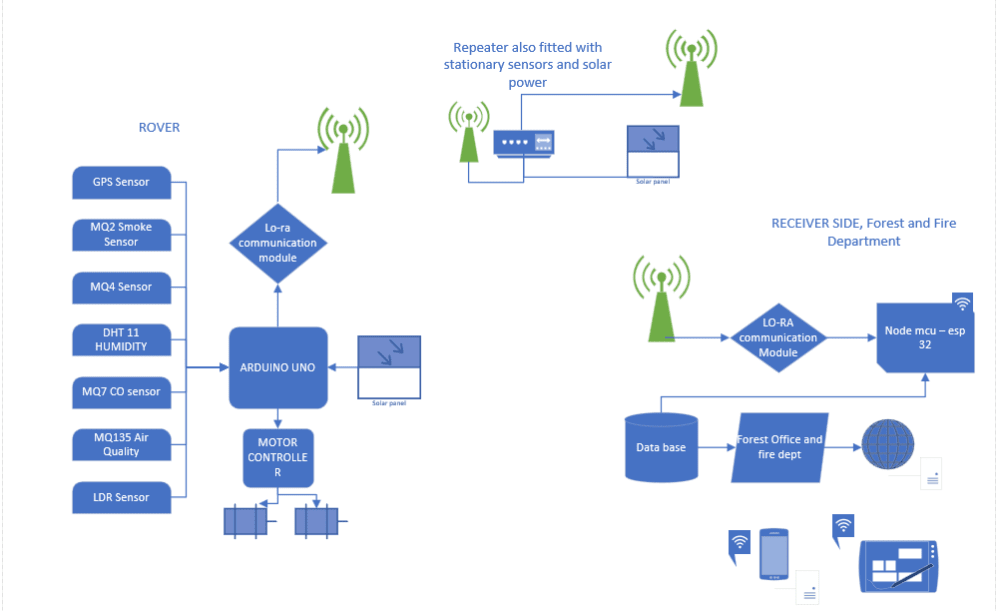
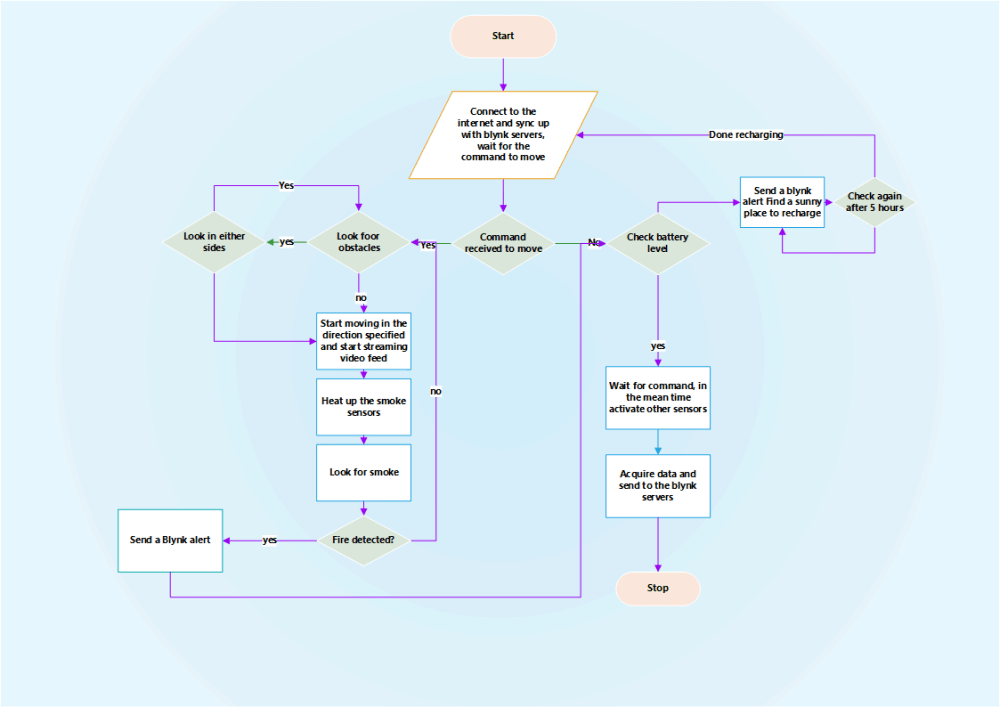
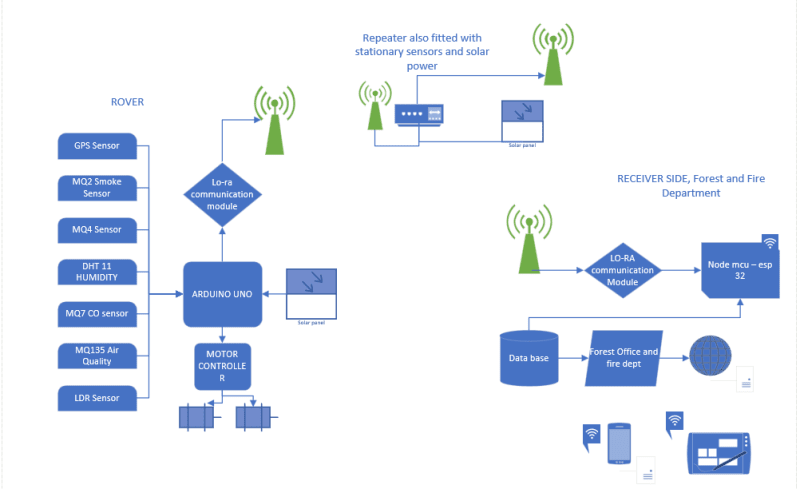
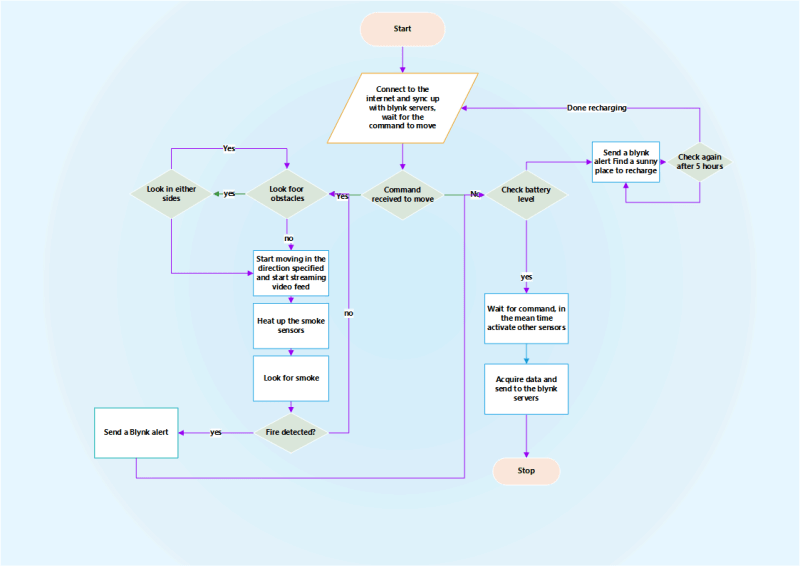
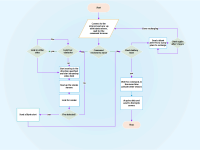
Our idea is to deploy several bots to study and assess a given span of forest area. These bots communicate with a centralized control station and relay the data from the field to the control station. These bots are also fitted with small fire extinguishers to react in case of an emergency. Our rover consists of six wheels, each controlled by a motor driver (l298n) with a microcontroller (NODEMCU - ESP32). It is fitted with a wide range of sensors like ultrasonic sensors, Fire detectors, cameras (esp32), and GPS (NEO6M) to assess various parameters. A Li-ion battery with solar charging powers the system. All the data collected are sent back to the control station along with GPS coordinates through the internet of things network.
This project is designed to form a network so many rovers can communicate, thereby making the job easier and safer for firefighters. Future improvements also include AI, ML, NL for complete automation.
Like this entry?
-
About the Entrant
- Name:Harini A
- Type of entry:individual
- Profession:
- Patent status:none