.jpg)
.jpg)
.jpg)
.jpg)

.jpg)
.jpg)
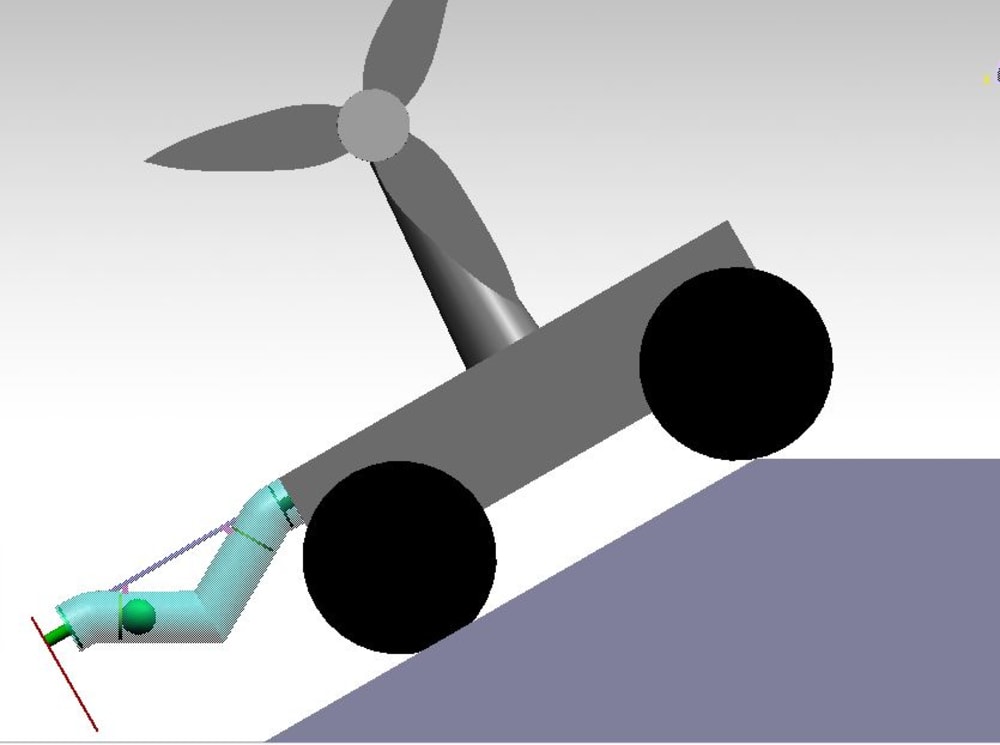
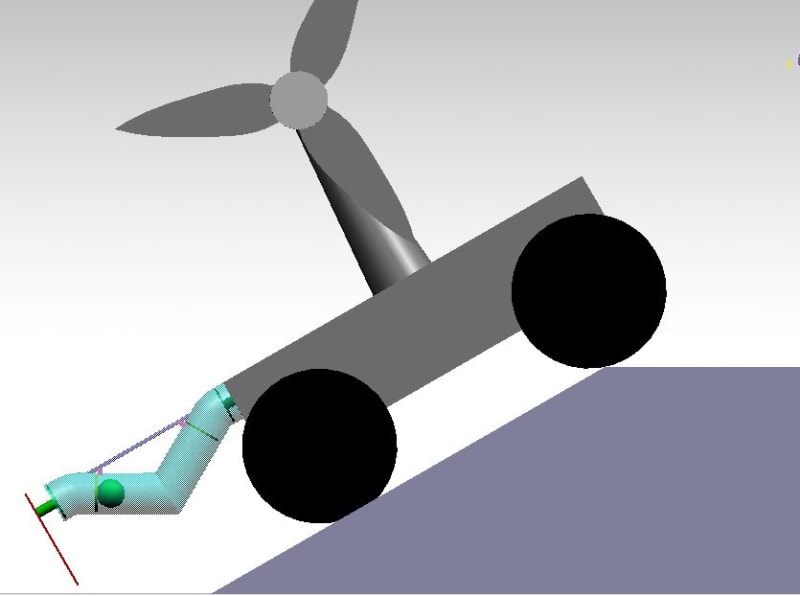
Maximum slope for hand-propelled wheelchair ramps should be 1" of rise to every 12" of length which is 4.8 degree angle. But wheelchair users only sense the slope of the ground they are travelling on while they are on it which is too late to take precaution measures. Whether it they are on upward or downward slope, if it is too steep the only thing they can do is try not to accelerate too fast forward or back ward but what if this can be avoided?
A few years ago I designed a 100% mechanical slope detection and reactive system that can stop Venus rover for the challenge “Exploring Hell: Avoiding Obstacles on a Clockwork Rover” which I believe could be used for wheelchair users.
This project is about building a slope detection and reactive mechanism that can detect high slope ground for wheelchair users and lock the wheels not to go forward or backward to prevent harm on the disabled person. This is done by using ball sphere with mass M that pushes an actuators with acceleration A when the wheelchair is about to travel a ground with slope higher than 4.8 degrees up wards and downward. Meaning, when the wheelchair is moving on flat surface or safe slope ground, the ball sphere will not travel to the actuators and no force will be applied to the actuators. But as the wheelchair is about to travel in an upward slope greater or equal to 4.8 degrees, the ball sphere will travel to the left actuator with acceleration A to push the left actuator. This actuator will push the pin that orders the wheelchair wheel lock. And also when the wheelchair is about to travel in downward slope greater than or equal to 4.8 degrees, the ball sphere will move towards the right actuator with an acceleration A and pushes the right actuator. This actuator will push the pin that orders the wheelchair wheel lock. When the sphere pushes the one actuator found either in the right or the left, it does not affect the other actuator because each actuator does not move backwards opposite to the direction where the fluid is filled. The maximum backward position the actuators move is the position when the roller is moving in flat surface. This is because there is a structure that locks the backward movement one for each actuator. This mechanism is powered by gravity 100 percent and it does not use the input power which is mechanical power. The fluid system of the sensor is connected with the V shaped cylinder to combine force action in upward and down ward force to push the pin.
For more information https://hackaday.io/project/191297-slope-control-for-wheelchair
Like this entry?
-
About the Entrant
- Name:Anteneh Gashaw
- Type of entry:individual
- Patent status:pending