









Over 1,000,000 people are killed each year during urban disasters. 2,500,000 people will be permanently disabled or displaced, and the affected communities will take 20 to 30 years to recover and billions of dollars in economic losses. If we can reduce the initial response by one day we can reduce the overall recovery by 3 years. If the initial responders including emergency medical services can get in, assess the situation, save lives, and mitigate whatever flooding danger there is, then other groups such as restoration, reconstruction, and betterment can get in to restore the water, the roads, and the services faster.
Urban Search and Rescue (USAR) robots can save lives and hold the promise to limit the monetary consequences of disasters. The first known use of USAR robots was in response to the 2001 9/11 bombing of the World Trade Center. This and other disasters have highlighted the potential benefit of USAR robotics. However, the biggest limitation to the widespread deployment of USAR robots and the realization of their full potential is their limited agility to move in confined spaces.
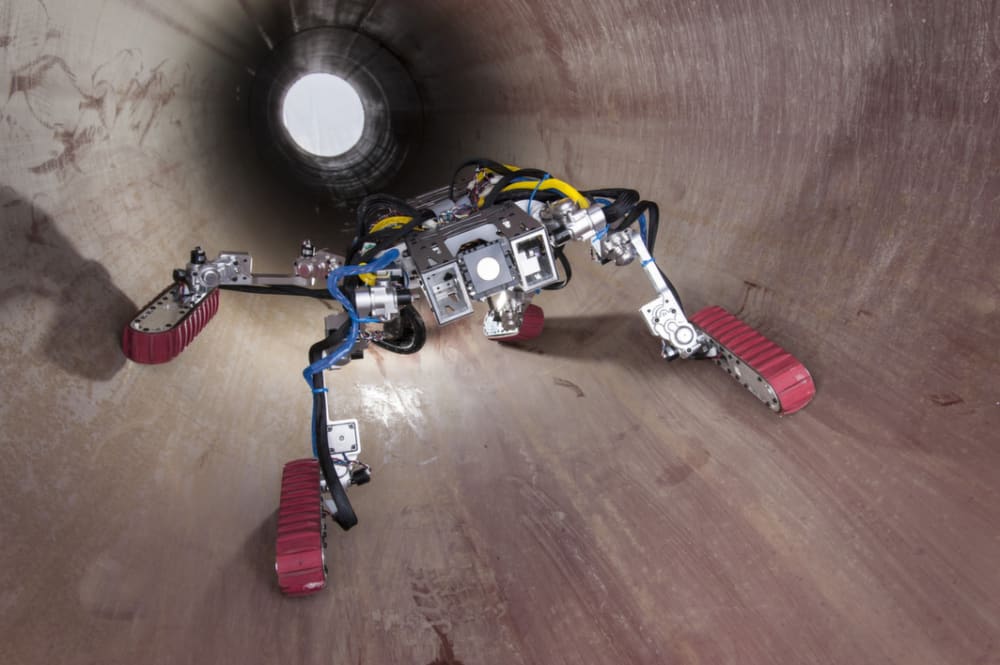
To solve such challenges we have developed a hybrid multi-legged robot dedicated to operating inside hazardous spaces found in USAR operations. Hybrid robots are herein defined as robots having two or more locomotion capabilities. For this, we have developed full-body motion planning for multi-legged reconfigurable hybrid robots operating within confined spaces. We have developed an advanced robot with sophisticated algorithms that enable it to maneuver through tight and constrained environments with precision and stability. By utilizing comprehensive kinematic and dynamic modeling, along with real-time sensory feedback, the robot can perform adaptive and flexible movement strategies. This includes overcoming obstacles, negotiating narrow passages, switching between diverse locomotion modes (walk, crouch, crawl, etc.), and maintaining balance in restricted areas. The integration of predictive multi-contact control mechanisms ensures that the robot can anticipate and respond to environmental changes swiftly. The developed robot enhances the functionality of multi-legged robots in scenarios such as industrial inspections, disaster response, and exploration of underground or underwater structures, where human access is limited or impossible. With the use of such a robot, we aim to improve the autonomy and versatility of robotic systems in challenging and confined USAR settings while pushing the boundaries of robotic mobility and providing advances to the broader field of autonomous systems and Artificial Intelligence.
Here, we propose various motion planning control and performance enhancement strategies to enable hybrid-robots (robots having two or mode locomotion modalities) achieve multimodal locomotion, including rolling, walking, crawling, and climbing depending on the geometrical conditions of confined (potentially fluid-filled and hazardous) environments. With these locomotion modes, hybrid robots can navigate through straight or bent gaps with varying sizes, tortuous channels, and tubes having slope, depression, and elevation changes. Such hybrid robot design along with its control and full-body locomotion performance enhancement strategies are promising to be deployed inside various confined and hazardous environments in urban search and rescue operations, military missions, and industrial inspection and repair tasks.
-
Awards
-
 2024 Robotics & Automation Honorable Mention
2024 Robotics & Automation Honorable Mention -
 2024 Top 100 Entries
2024 Top 100 Entries
Like this entry?
-
About the Entrant
- Name:Alex Ramirez Serrano
- Type of entry:individual
- Patent status:none