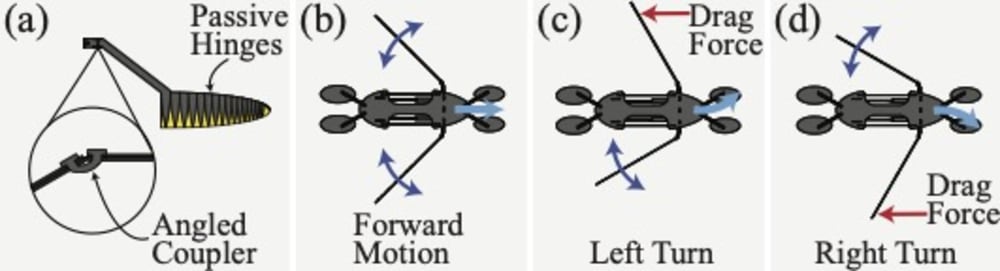

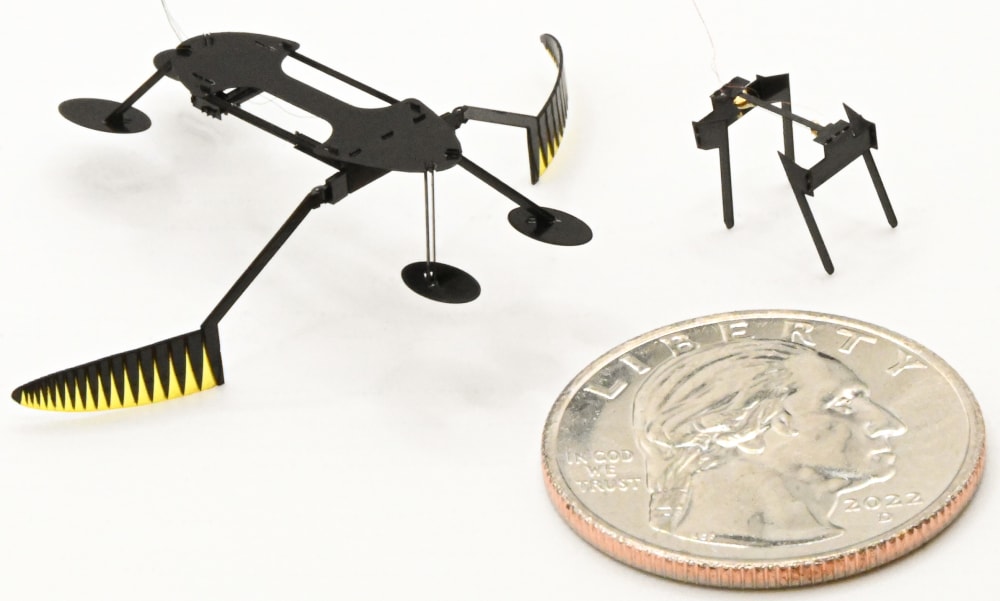
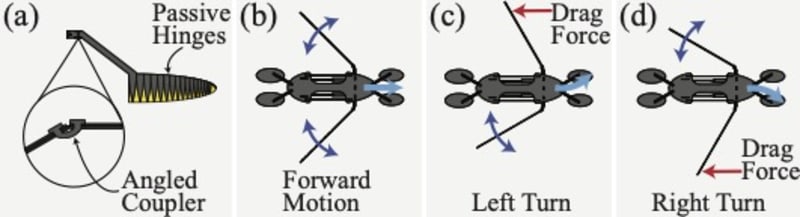







With a weight of 56 mg and a length of 22 mm, the WaterStrider (see illustrations) is the lightest controllable water-surface-tension locomoting robot reported to date. The WaterStrider is designed to efficiently utilize the large force outputs produced by a new 1-mg unimorph shape-memory alloy (SMA)-based actuator. The weight of the robot is supported by elliptical feet designed with large surface areas to exploit surface-tension forces while standing on water. Also, a highly flexible fin-like propulsor depicted in the attached illustrations is designed to take advantage of fluid-structure-interaction phenomena and thus increase hydrodynamic efficiency; actuating each propulsor independently enables locomotion and turning capabilities. The structural design and propulsion mechanism of the WaterStrider is inspired by water-surface tension locomoting insects in nature.
A key structural element of the WaterStrider’s body frame are twisting reinforcement bars, installed to prevent actuation-induced body warping during operation. The main locomotion mode designed for the WaterStrider is depicted in the attached illustrations. Here, the two four-bar transmission mechanisms receive as inputs the displacement outputs generated by the two SMA-based actuators and amplify them into large stroke-angle outputs that drive the fin-like bending propulsors of the system. As seen, during a locomotion period, the two actuators contract and then relax, enabling the propulsors to provide the force necessary to push the WaterStrider forward. During forward locomotion, both actuators are operated symmetrically, in open loop, to generate a large straight propulsion force. Accordingly, to execute turning maneuvers, one actuator-propulsor pair is actuated with a 5-Hz PWM signal while the other actuator-propulsor pair is left inactive, which produces a drag-based turning torque on the robot. The WaterStrider achieved locomotion speed of up to 0.28 body-lengths per second (BL/s) as well as perform turning maneuvers at rates of up to 0.144 rad/s.
Currently, the WaterStrider’s design is tethered to an external power supply, which significantly interferes with locomotion on the water surface due to very low friction forces. However, in the near future, the WaterStrider design will be modified to enable onboard power and autonomy as well as provide compatibility with a range of wireless power sources.
In the future, it is envisioned that aquatic-based microrobots of the WaterStrider type will serve to assist humans in complex tasks in the fields of search and rescue, assistive agriculture, automatic continuous water quality monitoring, naval inspections, pollutant leak detection, and many more. Due to the low-power consumption of the SMA-based actuator of the power consumption (approximately 50 mW), this design is compatible with utilizing onboard battery power and simple circuity to enable onboard intelligence, additionally, external energy harvesting mechanisms such as solar-cells can be used to extend mission life of a WaterStrider-type robot as batteries have very low energy densities.
Video
-
Awards
-
 2024 MRobotics & Automation Honorable Mention
2024 MRobotics & Automation Honorable Mention -
 2024 Top 100 Entries
2024 Top 100 Entries
Like this entry?
-
About the Entrant
- Name:Conor Trygstad
- Type of entry:individual
- Patent status:none