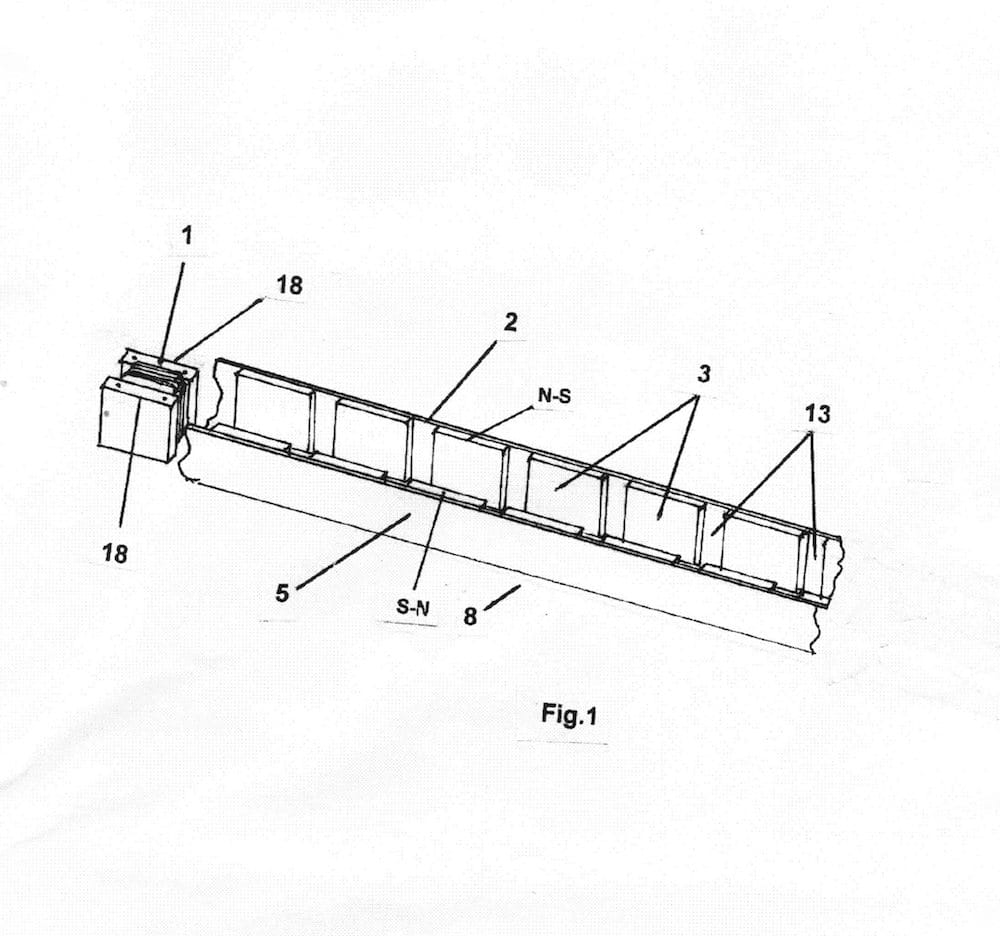

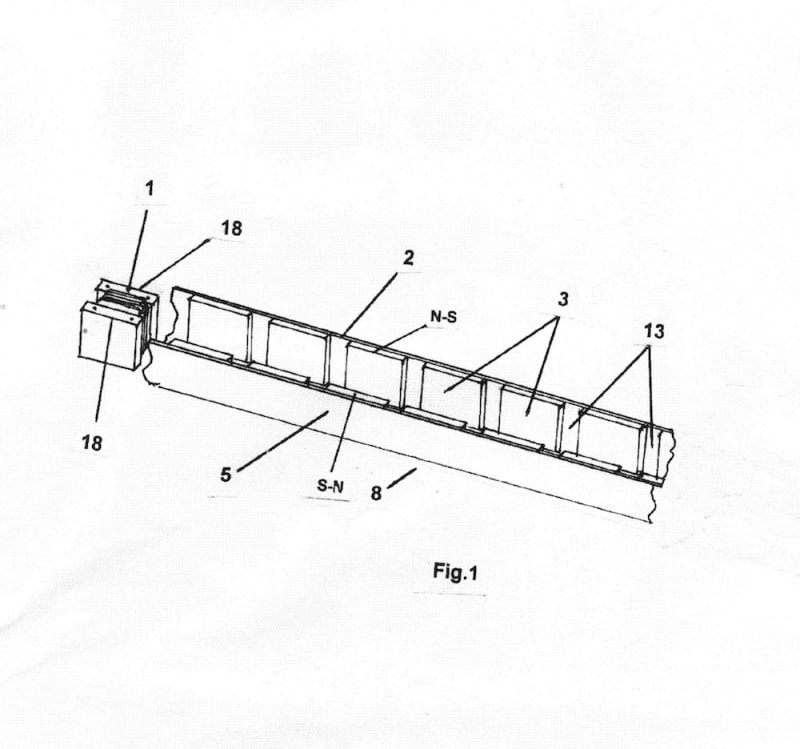


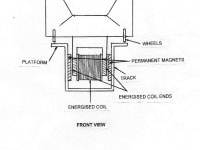
We all would have heard of Elon Musk’s proposed Hyperloop system and the competition to design certain aspecs of the Pod, and of particular interest was how to provide a braking system. How do you brake or stop a Pod that is traveling through a vacuum tube at up to 760 mph (1,223 km/h), that was the problem given to engineering students around the world. I am not an engineer, I am an inventor, and this is my solution. You use the Linear Motor that has propelled the pod to the high speeds required, to act as a braking system, by working in reverse, by that I do not mean by reversing the direction of the electric current. A linear motor works on magnetic attraction and repulsion, the principle of unlike magnetic poles attract and like magnetic pole repel, so by reversing the sequence, and having the magnets repel when they would normally attract, and attract when they would normally repel, the linear motor would remain stationary, can be made to act as a brake, with the same efficiency and torque as if it were a motor. There is an air gap between the ends of the energised coil, and the permanent magnets mounted on the track, so there is no friction, no moving parts to wear out.
This invention is an adaption of the technology demonstrated in my US patent no.6,812,615 for an electric motor, which effectively uses both sides of the energised coils to provide a means of forward and reverse propulsion and a means to incorporate regeneration while not using an electric current, but to also provide a means to slow or braking of the energised coils, without the friction and heat generated by physical contact between two surfaces that are suitable for a round electric motor or linear electric motor.
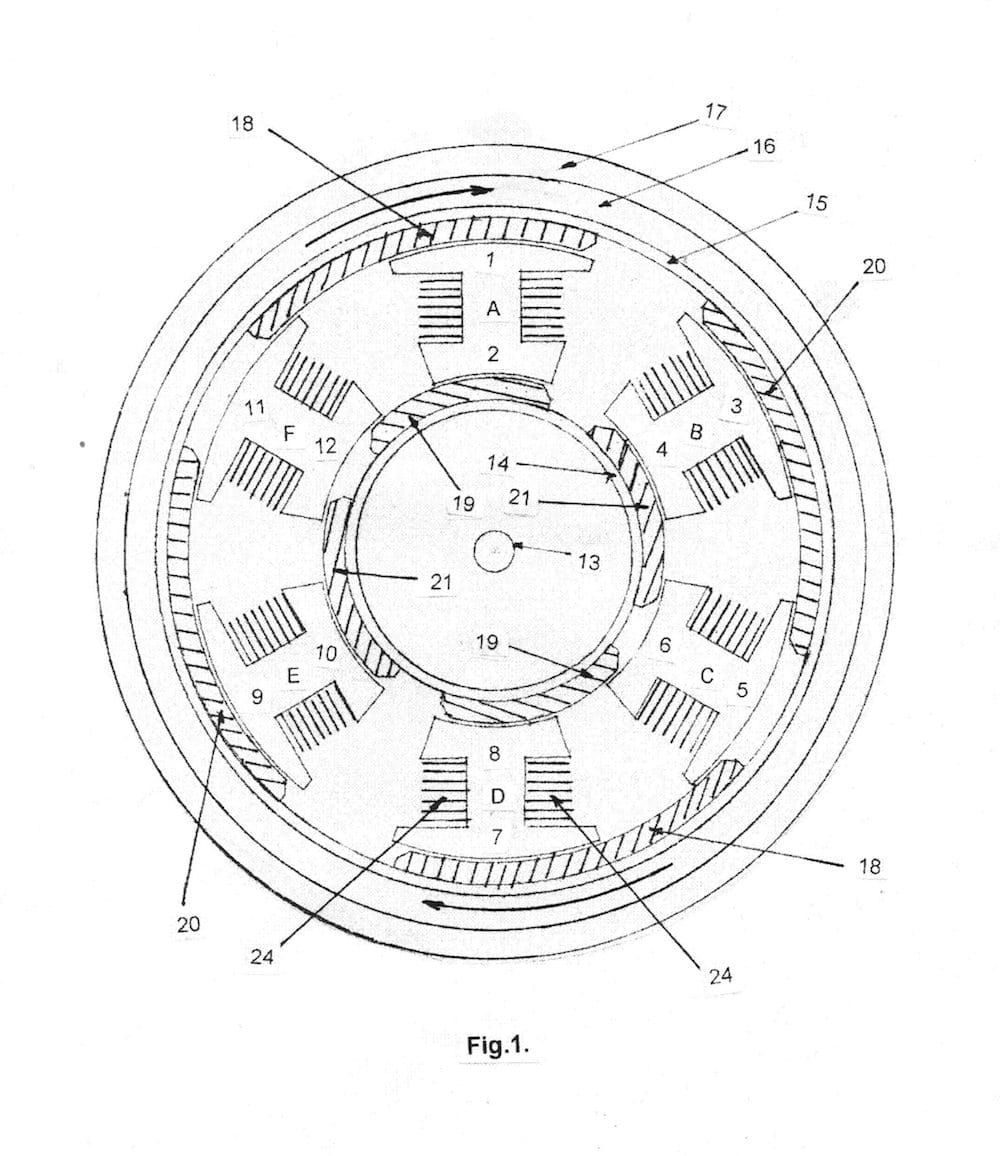
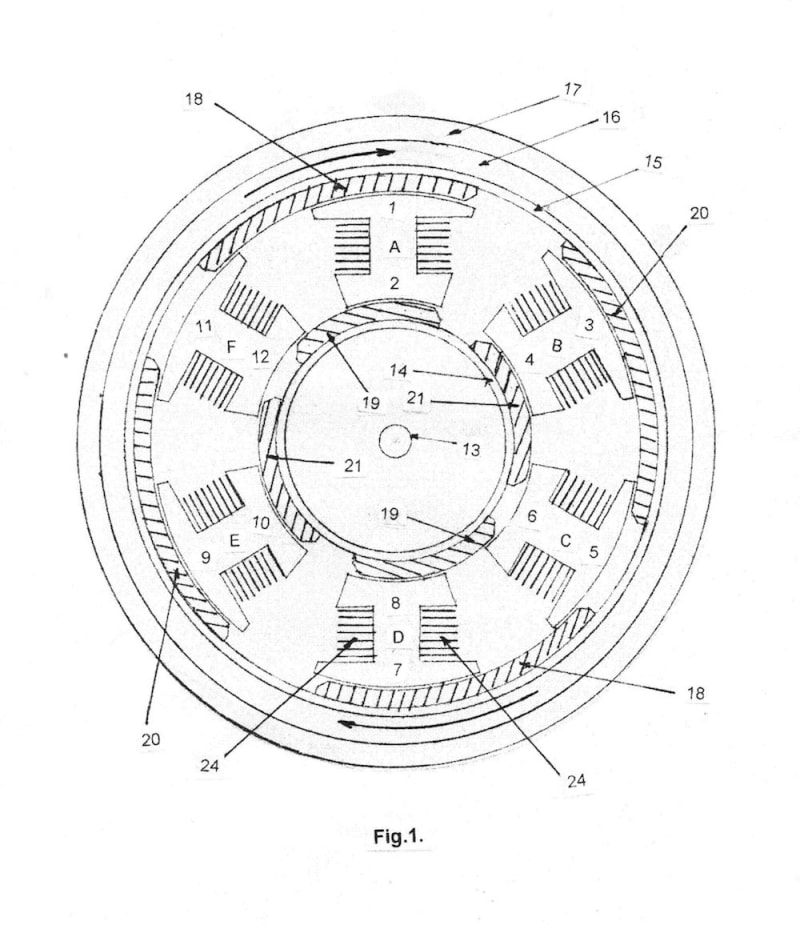
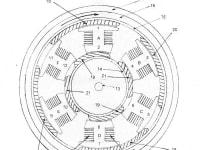
To understand how the electric brake works we again look at the energised coil A end 1, which is now a South magnetic pole, like magnetic poles repel, so the permanent magnet 18 would like to be repelled, but is forced in the direction of rotation by either inertia or friction, towards the center of the energised coil A end when it is over the center of end 1, the commutator or electronic controller changes the direction of the electric current, so now the magnetic pole at end 1 is now a North magnetic pole, and unlike magnetic poles attract, but the permanent magnet 18 is forced to move in the direction of rotation as the constant magnetic force is applied to stop the rotation of the permanent magnet 18, it will stop rotating and remain stationary, the force of braking is dependent on the amount of electric current and voltage applied, but it will be equal to the force and torque of the electric motor.
Like this entry?
-
About the Entrant
- Name:John Ettridge
- Type of entry:individual
- Patent status:pending