



This idea is inspired by MIT's small jumping robot cubes and the decades old technology used to orientate satellites in orbit.
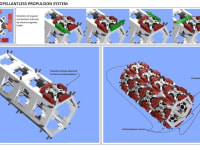
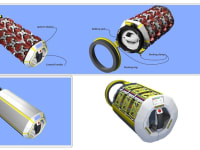
Reaction wheels (flywheels) rotate at high angular velocities and then are made to stop using one of the four electromagnetic brakes transferring angular momentum into the body of the frame. Once the energy from the flywheel has dissipated the flywheel starts to spin again until it reaches maximum rotation and is ready once again for action.
When the brake is activated the frame gets jolted forward slightly but with a slight curve towards the centre of the body of the frame. This is then countered by a reaction wheel spinning in the opposite direction on the other side of the frame being caused to brake and sending its angular momentum into the frame as before, this is repeated around the entire device causing it to move. The direction being defined by which electromagnetic brake is activated.
The reaction wheels are divided into clockwise and anticlockwise rotating column's to help prevent any unwanted frame rotation induced by the reaction wheels.
The strength and duration of breaking as well as which electromagnetic brake is activated would be controlled via algorithms based on input commands received from the control handle, pre-programmed instructions or by wireless command.
This would enable motion in any direction, although in the model shown there are only 24 reaction wheels which would probably make the movement judder slightly.
This is by no means an ideal solution for a propellant-less propulsion system but could be a step in the right direction.
This system would be useful for transferring cargo and personnel from A -B in an enclosed space , or even as an engine if scaled up (but only in a micro gravity environment).
Like this entry?
-
About the Entrant
- Name:James Drew
- Type of entry:individual
- Software used for this entry:truespace 3.2
- Patent status:none