


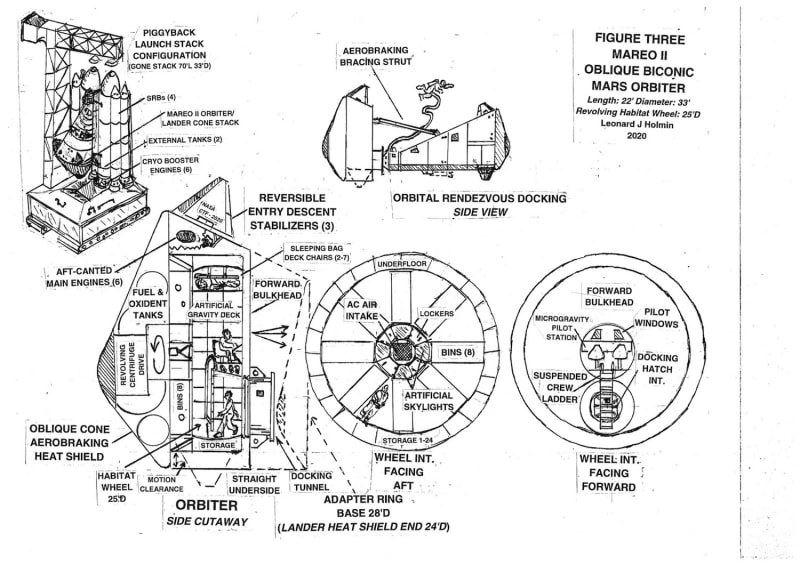
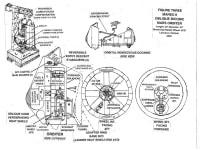
Enters Mars orbit via MAREO II Orbiter (FIGURE THREE; Holmin CTF 2017, 2018). Cone stack launches piggyback atop twin external tanks, six cryo engines, four SRBs. Comprises 33'D base block; aeroshell; stabilizers; aft-canted main engines; adapter ring jettisoning for orbital rendezvous docking; aerobraking bracing strut; revolving wheel habitat; underdeck storage; bins; sleeping bag deck chairs; microgravity pilot station; artificial skylights.
Surface vehicle for 2-7 astronauts lands on Mars, explores and returns crew to Earth with rock and soil samples.
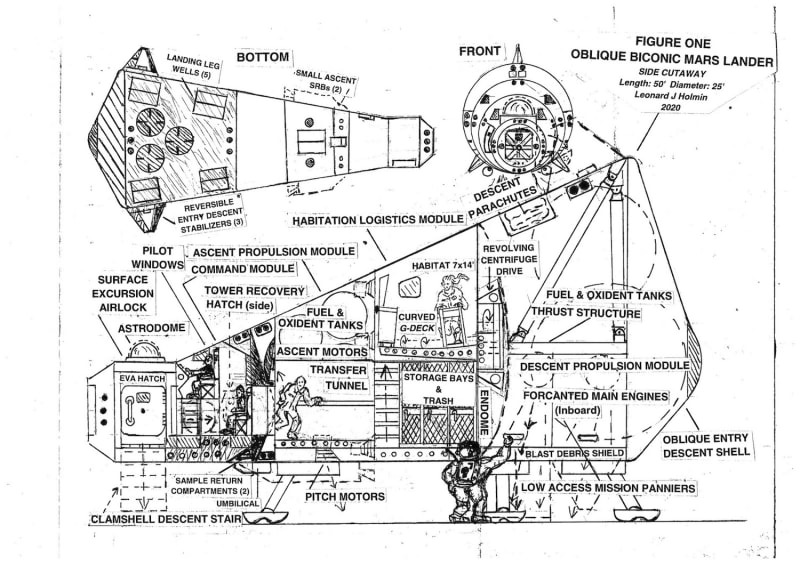
Lands horizontally, oblique stacked cone design (FIGURE ONE) positions Airlock, Descent Stair, Mission Panniers and Sample Return Compartments near ground: Straight underside; uniform ground height from nose to base.
Oblique cone heat shield for descent entry. Reversible stabilizers aid entry control; provide lift to reduce deceleration forces on crew. Enters base first and inverted; deploys braking chute; pitches nose forward; deploys descent parachutes.
Touchdown powered by three for-canted main engines, inboard underside of Descent Propulsion Module (DPM); 2-axis thrust vane control. Thrust structure supports forward mass via canted perpendicular thrust. Pitch Motors under Ascent Propulsion Module (APM) assist balance. Blast Debris Shield protects underside during landing. Five landing legs deploy from underside wells.
Oblique Command Module (CM) horizontal crew decks have storage under floor. Side hatch for tower access and crew recovery; horizontal air bags or flotation a la Gemini. CM reenters Earth's atmosphere or carried back in a payload bay. Twin pilot seats elevated to meet rendezvous windows; center aisle.
Surface Excursion Airlock accessed via bulkhead hatch. Astrodome permits observation while in space or on surface. Airlock has nose docking hatch, stowage bench, space for stowing and donning spacesuits, EVA Hatch and Clamshell Descent Stair (Holmin CTF 2017).
APM returns CM to Mars orbit. APM fires, separates and pitches up; twin underside Small SRBs (Solid Rocket Boosters) comprise first ascent stage; SRBs drop away; liquid fuel Ascent Motors carry CM and Airlock back to Orbiter.
Narrow Transfer Tunnel through APM accesses the Habitation Logistics Module (HLM), which later remains on surface with DPM.
HLM has two levels: Storage and trash below, organized for periodized replenishment and trash removal.
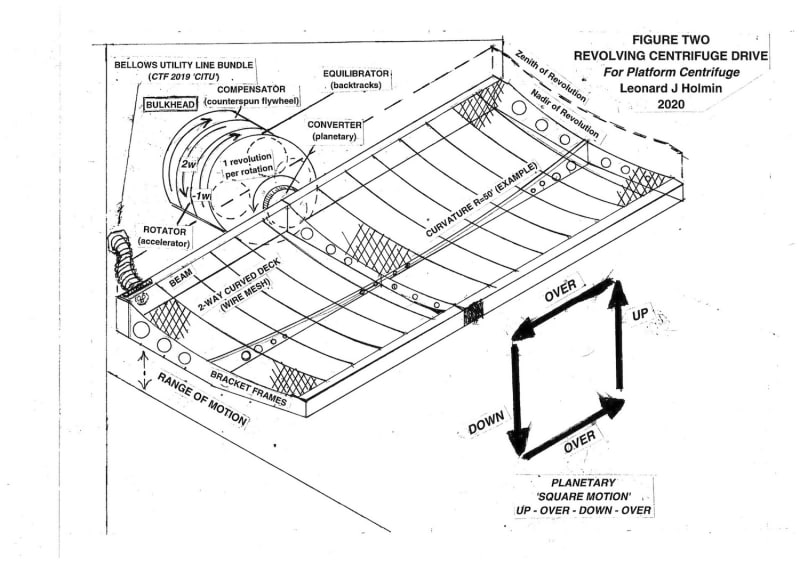
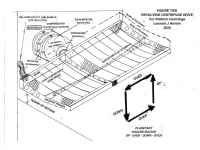
Upper level has a Platform Centrifuge (FIGURE TWO) comprising a suspended deck (wire mesh), 2-way curved as if a segment of a larger wheel (eg, R=50'). Deck stays oriented, using planetary or 'square motion', up, over, down, over (doesn't rotate). It revolves between its zenith and nadir points, within a limited range of motion, much like a children's mechanical horse ride (Hahs 1932). Features a flush treadmill, exercise area and gravity-aided toilet.
Centrifuge drive comprises a ROTATOR, imparting acceleration at twice target speed (2w); an EQUILIBRATOR which rides on former and backtracks (-1w) to mitigate Coriolis Effect, final speed 1w (Holmin CTF 2018). A CONVERTER to planetary motion allows platform configuration and use of bellows utility bundle (Holmin CTF 2019 'CITU'). A COMPENSATOR comprises an independent counterspun flywheel for precession. System provides 'artificial gravity' to maintain astronaut health and fitness both in space and on low-g surface of Moon or Mars.
Video
Like this entry?
-
About the Entrant
- Name:Leonard J Holmin
- Type of entry:individual
- Software used for this entry:None
- Patent status:none