
This space-transportation-system proposal is a reusable, optionally-manned, modular spaceplane to transport payloads and/or personnel into low-earth orbit. The emphasis is to reduce the number of maintenance man-hours vs. flight-hours to drastically reduce 'turn-around' time, making the vehicle commercially viable. Another objective is to provide "zero-to-orbit" escape capability for manned missions to improve crew safety at the expense of payload capacity. Finally, the ability to operate as an Autonomous-Unmanned-Aerospace-Vehicle, launches significantly more payload can by into orbit; since space and mass for the modules and resources to support them are opened for payload.
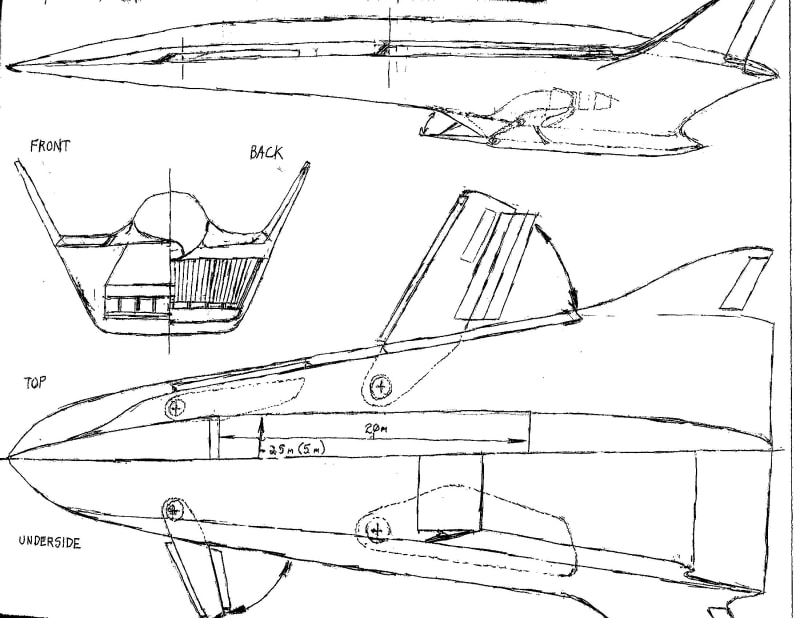
The basic design is a variation of the Inverted-D lifting-body similar to the X-30 / X-43 designs; using a high-mounted, retractable, variable geometry (VG) wing and canard both using a symmetric-supercritical-airfoils of high-temperature, graphite-composite construction, and with a Nomex inner-core and outer coating. They use blown slats and 2-3 stage Fowler-Flaps, and spoilers on outer-part the main-wing. Though VG typically adds 10% to structural-mass, because the wings are optionally for speed of Mach 2.6 down to 160 knots, they can be retracted into the body, not requiring the weight of a Thermal-Protection-System (TPS) to protect from the heat of reentry. In this case a cam-driven set of TPS ‘Gloves’ close off the openings for the wings and canards from the super-heated gases of speeds past Mach 3. Other materials used in its construction would be Titanium, Beryllium, Inconel and/or Hasalloy. The primary TPS is ARMOR Metallic TPS directly mounting to the airframe structure, it serves as a substrate for SHARP Ceramic TPS. SHARP is used as a coating, or for leading and trailing edges. This provides a robust, redundant, and easily-maintained TPS which has already been successfully developed and tested by NASA. Control is provided by a quadruple-redundant flight/mission-control computers configured in a mesh topology to ensure total redundancy. Data is provided by 3 inertial platforms using laser-ring gyroscopes and 3-axis accelerometers, and 2 star-tracking systems. Aerodynamic control is provided by triple-redundant fly-by-wire system operating the control surfaces. Reaction control uses aerospike thrusters (linear and truncated-plug-nozzle) burning JP-7 fuel, and using Anhydrous H2O2 as an oxidizer, giving a specific-impulse ~320 lb/sec. This vehicle normally operates as Autonomous-Unmanned-Aerospace-Vehicle with remote mission-management (piloting) as needed. Local control of the vehicle is possible with the addition of the Manned Flight Module, with controls located in both the Command-Module, and the Habitation-Module.
The propulsion for this vehicle is the Combined-Cycle Hybrid Subsonic/Supersonic Combustion / Pulse Detonation Engine in a separate contest entry.
Carrying astronauts requires two modules installed. A Command module which is based on an FDL-7 variant accommodating seven astronauts; using Variable-Geometry Stabilators to retract, and a steerable parafoil for landing. At the back of the command-module, a pressurized-tunnel connects the habitation module. The habitation-module a SpaceHab module provides sleeping, eating, lavatory, airlock, secondary-control, vehicle-access, and life-support. In emergencies, the command-module uses explosive-bolts to separate from the spaceplane, and a solid-fuel motor set at 45 from vertical from the module to escape; operating up to 48 hours, before independently reentering.
Like this entry?
-
About the Entrant
- Name:Jeff Kavanaugh
- Type of entry:individual
- Software used for this entry:N/A
- Patent status:none