

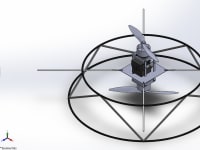
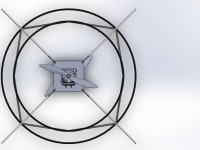
Since the aerial delivery system is already in action nowadays. But to make our aerial vehicle lighter and compact. We introduce a counter-rotating, coaxial vehicle. Making flying vehicles smaller, simpler, and lower cost is the goal of this work. There’s a developing interest in the design and control of counter-rotating, coaxial prop-rotor aerial vehicles. The coaxial prop-rotor vehicle which we are propounding can achieve three degrees of freedom i.e. pitch, roll, and yaw. Such vehicles use swash plates to attain pitch, roll, and yaw. But instead, we would be using lighter servo motors to do the likewise. The coaxial prop-rotor will be light and robust and the payload that it would be carrying would also be less.
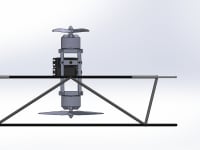
Micro air vehicles (MAV) exemplified by quad-rotors generate downward thrust in their body-fixed frame and may only maneuver spatially by changing their orientation. As a result of this under-actuation, they are fundamentally incapable of simultaneously regulating orientation and position. Furthermore, their feasible maneuvers are limited to spatial trajectories with continuously differentiable acceleration. We present a coaxial prop-rotor that emulates full actuation over forces and torques (3 degrees of freedom) using only two servo motors. The orientation of the thrust vector from each rotor is governed by the drive motor by exciting a cyclic flapping response in special articulated blades. The useful separation of orientation and translation dynamics is demonstrated in-flight experiments by tracking spatial trajectories while maintaining flat body attitude as well as tracking desired orientations near hover while station keeping.
There has been much debate over the years about whether the co-axial rotor arrangement is more efficient than traditional layouts. Now the idea which we are propounding reduces the cost and the complexity at the fundamental level wherein civilians overcome the hindrance while operating and UAV. Using a quadrotor for several purposes may require some pre exquisite knowledge. At this point where we disclose the idea of coaxial proprotor has more perks than any other drone. It also gives it mobility to reach out to the zones where there’s an inconvenience. Since the prototype which we are making is lightweight and robust but it can’t lift things which are too heavy. So, here we have an advantage in easy controlling and the compactness.
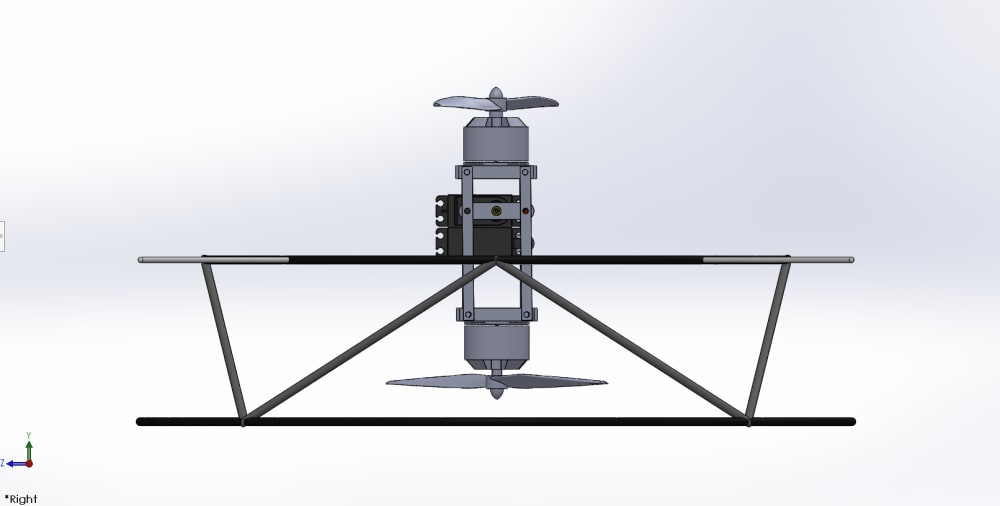
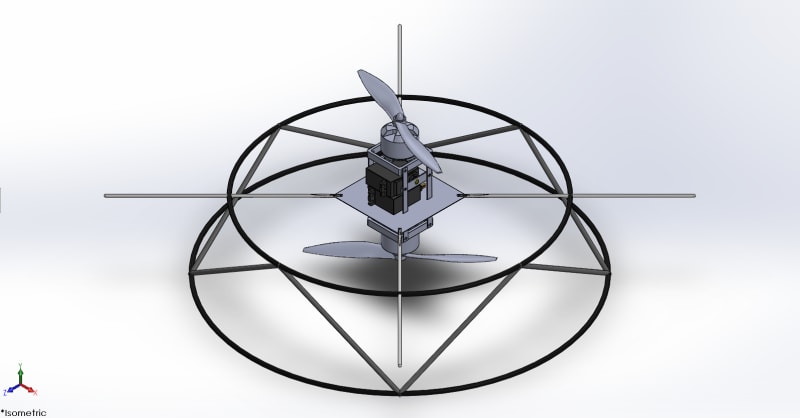
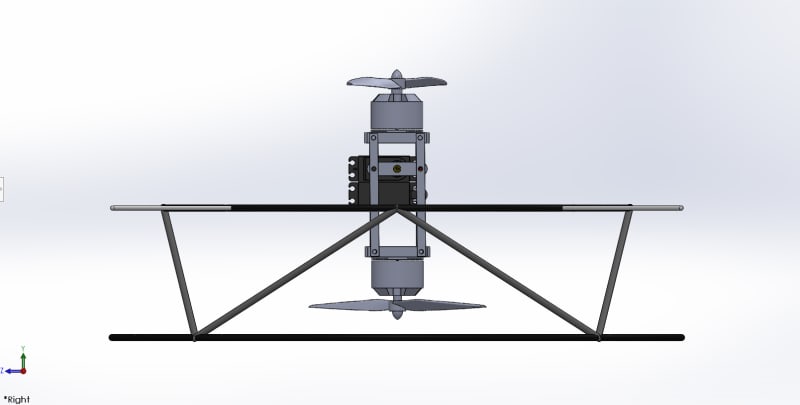
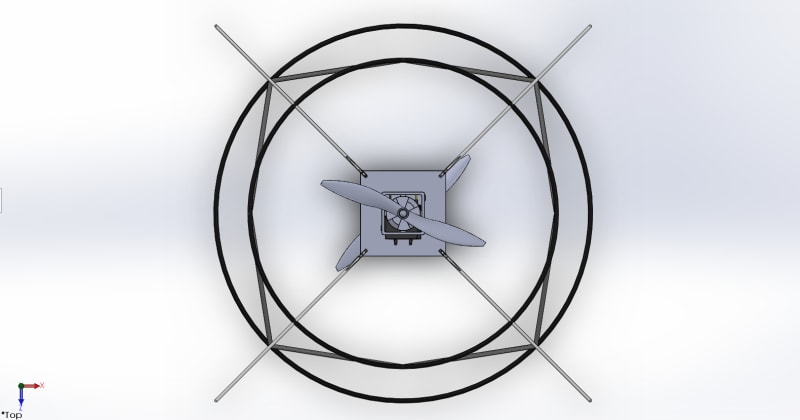
The plan of action is quite basic as the name itself reveals the UAV will be having two BLDC motors which are on the same axis and these two motors will be attached to servos to attain the other degree of freedom. The direction of the thrust of the two rotors can be redirected by tilting propellers laterally and longitudinally with the help of servos. This mechanism uses two servomotors for independently controlling the lateral and longitudinal tilt of the two rotors.
Cost, complexity, and reliability will continue to be fundamental challenges in real-world civilian applications of this technology. This design reduces the number of expensive motor and power electronics components required when compared to quadrotor or conventional helicopter platforms. It also eliminates the demanding final assembly and maintenance.
Like this entry?
-
About the Entrant
- Name:Ajay Hudge
- Type of entry:teamTeam members:Orunganti Prudhviraj
- Software used for this entry:Dassault Systemes SOLIDWORKS 2019
- Patent status:none