




Vehicle Distance Warning and Signaling System (DWSS) is an improved version of the Dynamic Traffic Light (DTL) bearing SAE paper No: 980560 presented and published in 1998. The traditional brake signal on the rear of vehicles provides insufficient information which only informs a following-vehicle (FV) that its lead-vehicle (LV) is braking. The Autonomous Emergency Braking (AEB) systems that are currently installed on many vehicles set a predetermined Time-to-Collision (TTC) value to compare it with a real-time software calculated time (T) needed to travel relative distance between two vehicles at their relative speed. While AEB does not calculate TTC dynamically, AEB also suffers from an improper method to calculate the T as AEB does not consider speed ranges and acceleration of the relative speed. AEB may also suffer from computational latency of its software while its computations may lead to divide relative distance by relative speed of zero. Moreover, AEB needs to provide a short TTC which may not be enough to prevent crashes in many critical situations and therefore it needs a complementary system.
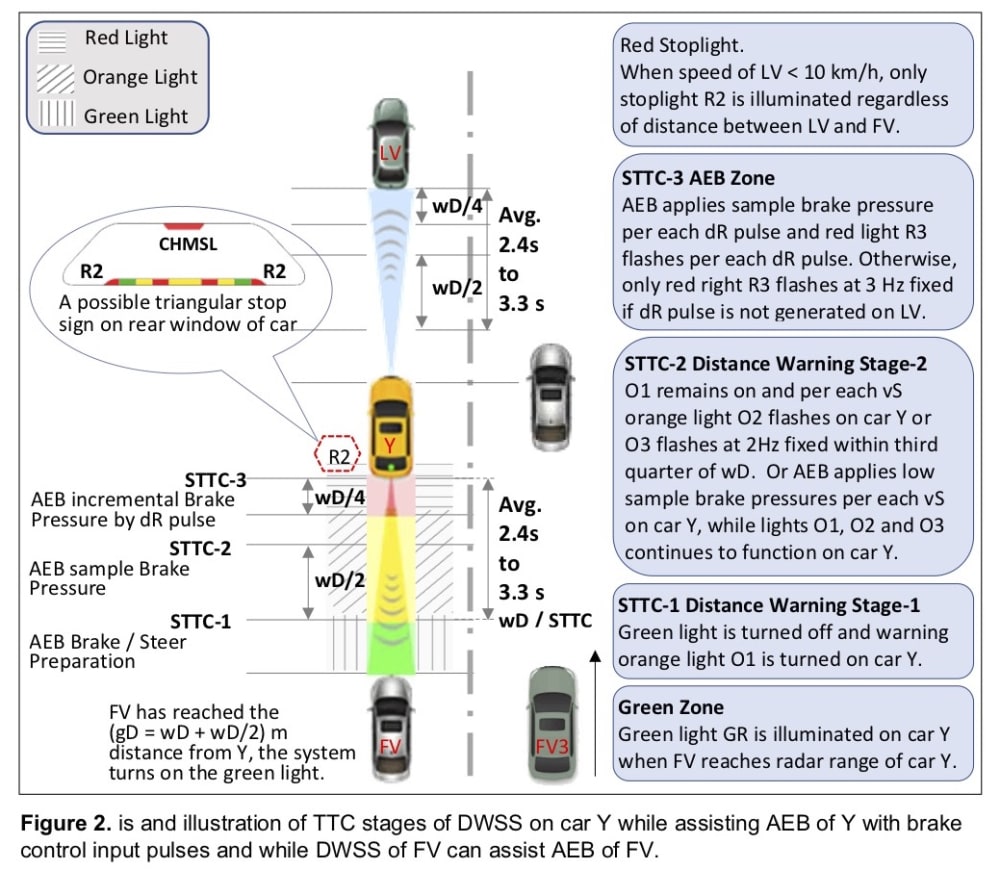
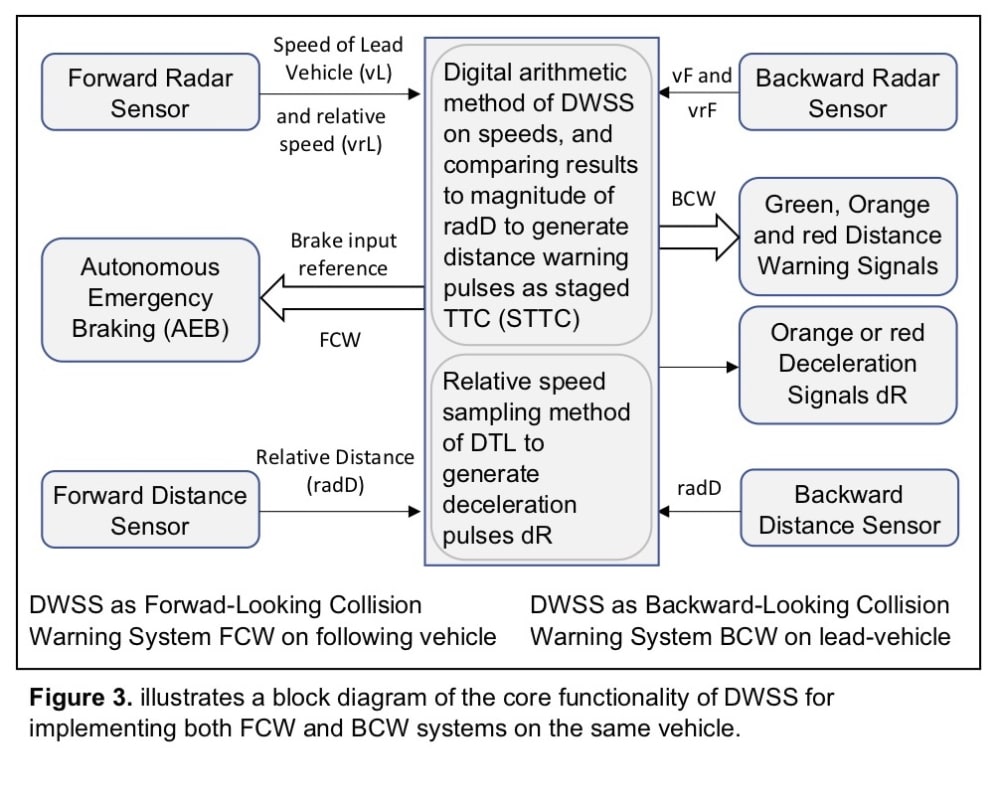
DWSS is designed with respect to previous research findings to improve rear signalling of vehicles while it can also assist AEB to improve its functionality. DWSS uses hardware-only to implement a novel algebraic formula without using software to dynamically calculate long TTC to be divided into three stages of TTC or (STTC) with computational latency of almost 0 second (s). The novel formula only considers speed of the two vehicles as its variables and its resultant value is used to determine an unsafe or warning distance (wD) between FV and LV. Unlike the simple brake lights, DWSS helps drivers to maintain safe headways to prevent them from reaching a critical TTC and reduces perception-reaction time of drivers by a change of color of its advanced waning signals if Time-to-Collision is reached. DWSS also produces Distance Reduction warning pulses (dR) with a frequency proportional to the acceleration of the relative speed of FV and LV. DWSS flashes an orange or red light per each dR pulse to communicate the distance reduction rate of LV to FV. DWSS uses the STTC and dR pulses to function as: A) Backward-Looking Collision Warning (BCW) system on the host LV to improve rear-signaling of LV for preventing or reducing the need for autonomous braking by driver or by AEB of FV; and B) Forward-Looking Collision Warning (FCW) system on the host FV for providing in-vehicle warning signals for driver of FV and for assisting AEB system of FV to: i) prepare the brakes on FV in advance when the first calculated TTC stage is reached; and ii) use the dR pulses to apply incremental pressure on the brakes of the host LV when subsequent TTC stages are reached and while the driver of FV does not react to warning signals of LV.
Like this entry?
-
About the Entrant
- Name:Hamid Kashefy
- Type of entry:individual
- Patent status:pending