






The Emergency Autonomous Response System is a system of intelligent and connected autonomous vehicles to support in emergency scenarios and provide an immediate response to the situation. Due to the increase in the rate of natural and man-made calamities, we need to recheck our ability to perform an emergency response operation without any delay. With the help of the latest technology, it is now possible to reduce the delay in response required to provide help and support to an emergency scenario such as a disaster, calamity, or incident. It drastically reduces the amount of workforce required for carrying out highly sophisticated tasks. Using a connected autonomous system consisting of aerial (Drone) and ground vehicles (RC car), a scene can be monitored in real-time and instant support can be provided.
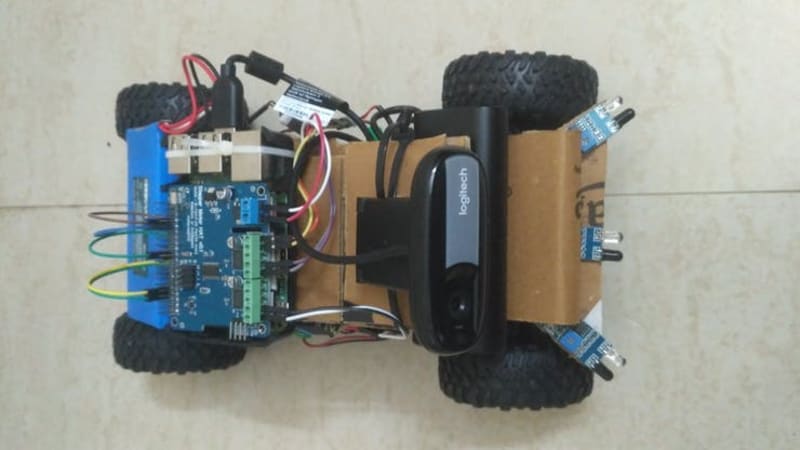
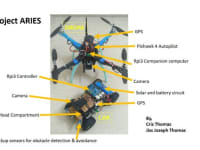
The drone autonomously scans and map the area of interest (using Camera) and tags the locations (with help of Computer Vision) consisting of stranded people, high-risk areas, entry points, exit points, etc. to identify the specified key locations and entities. As a parallel operation, the data is monitored live by an emergency response team at the Ground Station Support. The software implementation for purely based on Python. The backbone of this framework depends on ROS, MAVROS, and MAVLink modules. Using various APIs, we are able to call functions that can carry out specific tasks such as drone takeoff, land, position control, way-point execution, etc. Identified way-points are uploaded to the car, which then navigates the terrain autonomously to the received location coordinates. With the help of the car's onboard obstacle avoidance and path-planning algorithm running on Rpi3 along with the data based on open-source map and location tags generated by the drone, emergency supplies such as food, water, first aid, etc. will be delivered at these locations. Robot Operating System (ROS) running on Rpi3 on drone and car will act as a middle-ware to synchronize the functions between both. The prototype drone and basic car have been developed using the Pixhawk flight controller and Raspberry Pi 3 respectively. The ground vehicle is also equipped with optional solar panel cells and an automatic solar battery charging circuit for seamless and extended periods of operation, enabling recharging on-the-go. A python program is developed to give custom commands to the ground vehicle. This program is run on the onboard raspberry pi and controls the vehicle using the motor drivers. Manual control of the RC car is implemented using a custom-developed mobile application. It also provides live camera feed from the on-board HD camera. This app allows manual and semi-automatic operation of the ground vehicle. Manual control is performed via a virtual joystick implemented in the app and semi-automatic operation by obstacle avoidance is carried out by the manipulation of various onboard IR sensors via the python program.
This system and its area of operation can be expanded further by adding multiple aerial and ground units.
Video
Like this entry?
-
About the Entrant
- Name:Cris Thomas
- Type of entry:teamTeam members:Cris Thomas, Hardware Engineer, Team Deodates
Jiss Joseph Thomas, Software Engineer, Team Deodates - Software used for this entry:Gazebo
- Patent status:none