






As evidenced by recent events, it is a well-known fact that space debris is a growing threat to operations in space. The proliferation of satellite swarms and constellations is exponentially adding to the danger of catastrophic mission failure or debris scattering. Additionally, spacecraft thrusters may increase that threat due to explosive volatility. As spacecraft swarms and constellations become more ubiquitous, it is crucial to find safer and more reliable ways to maneuver them, while ensuring safe disposal at the end of the mission. We propose a unique propellant-less robot that can act as part of the spacecraft subsystem to control its orbit and attitude. A side benefit of thruster-free control is weight and fuel cost savings.
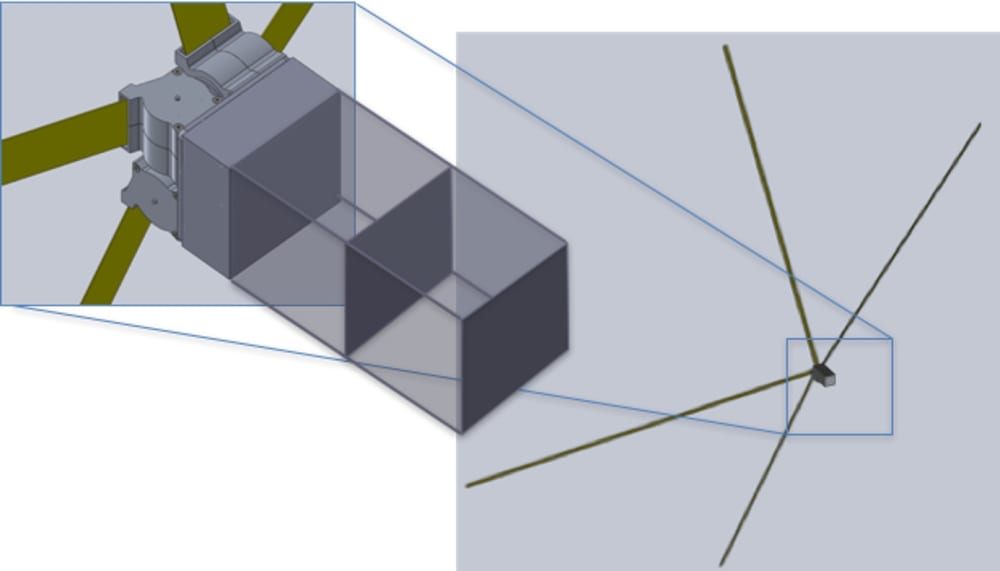
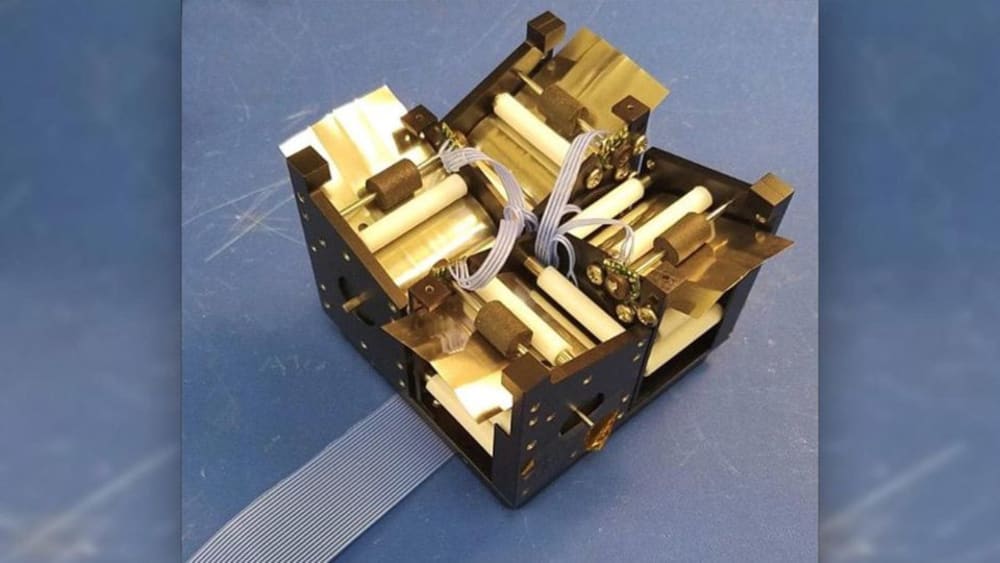
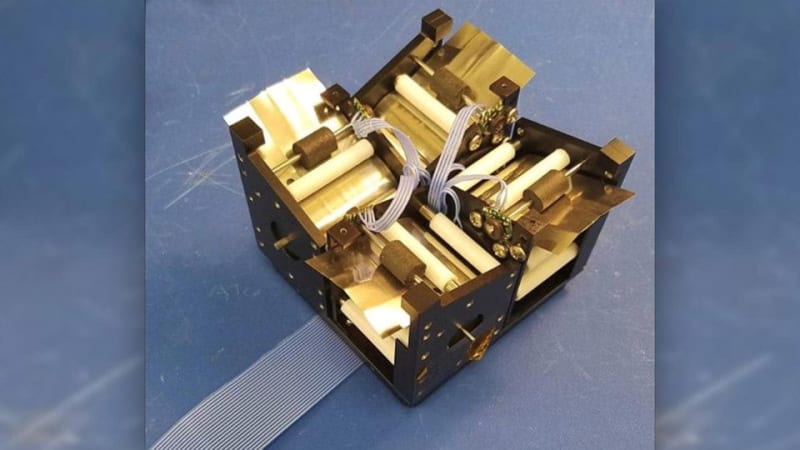
The D3 modulates the spacecraft drag force, while controlling orientation and orbital decay. It can be used to control a satellite constellation, deorbit a satellite, and target the re-entry location. It does all this passively, by changing the spacecraft geometry via four independently deployable/retractable surfaces mounted in the back-end of the spacecraft in a dart configuration, to exploit drag and gravity gradient forces and torques, without any need of propellant. The surfaces (also referred to as booms) act similarly to measuring tape, rolling inside a deployer when contracted and motorized out when maximizing the drag and/or gravity gradient.
The D3 is a simple, reliable, low-cost, non-propulsive system. Any operators of a small spacecraft can use the D3. Several examples are CubeSats, CYGNSS spacecraft, ESPA Class spacecraft, and the Orion 38 motor (depleted). The D3 is a functional TRL 9 subsystem unit that is approaching market readiness. Orbotic Systems has devoted a substantial amount of time and resources to make the D3 available to spacecraft operators. We are currently working with the D3 development team to commercialize the system.
Video
-
Awards
-
 2021 Aerospace & Defense Honorable Mention
2021 Aerospace & Defense Honorable Mention -
 2021 Top 100 Entries
2021 Top 100 Entries
Like this entry?
-
About the Entrant
- Name:Erik T Long
- Type of entry:teamTeam members:Dr. Riccardo Bevilacqua, Dr. Laurence H Fineberg, Dr. Dave Guglielmo, Erik T. Long, Dr. Camilo A Riano-Rios, Nicolo Marcello Woodward
- Software used for this entry:MatLab and SolidWorks
- Patent status:pending