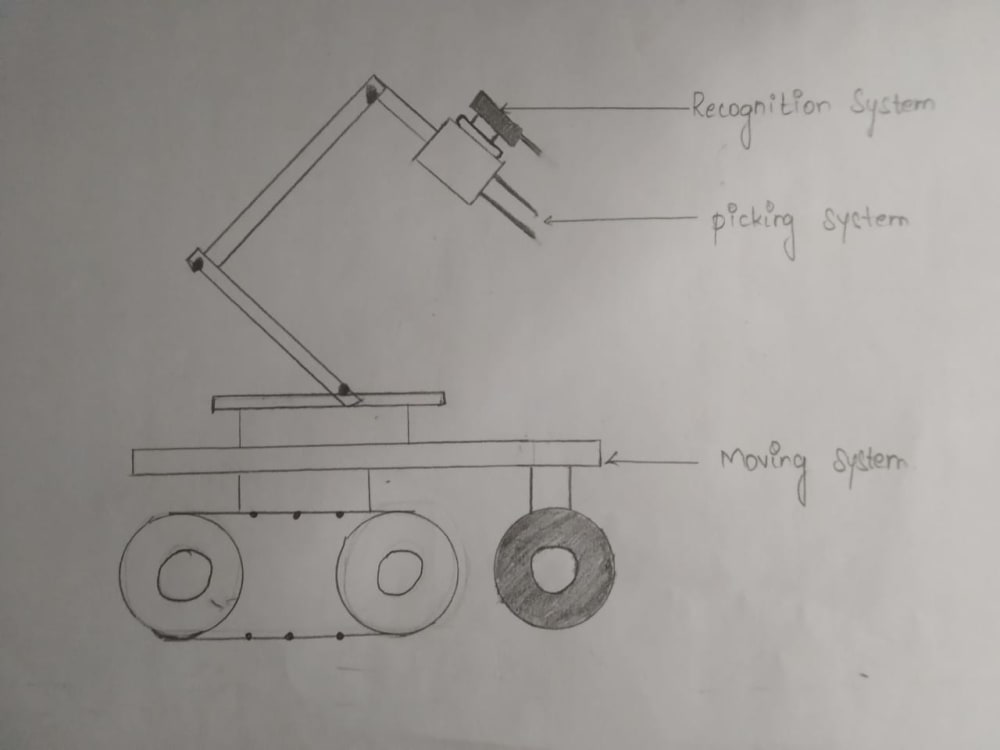
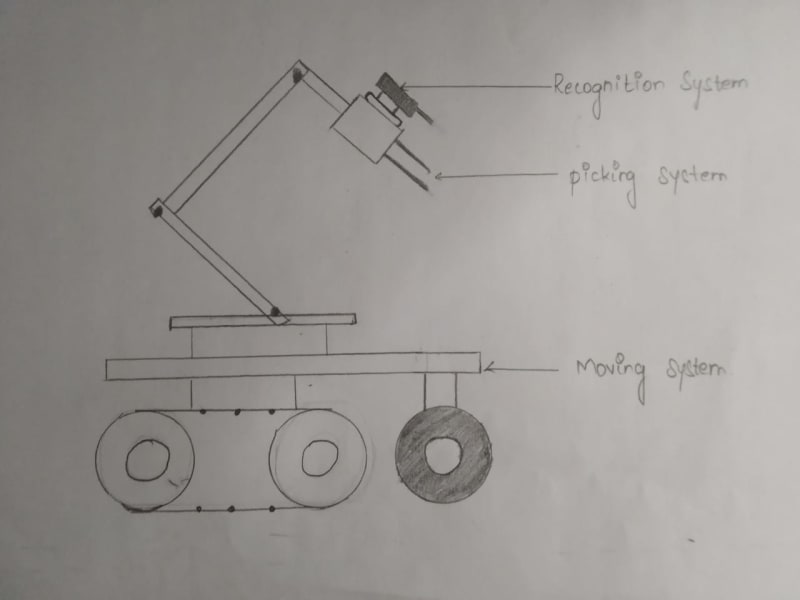
Flower Harvesting BOT is a new innovative idea which is developed in concern with Farm Labor, in order to reduce the work and time consumption of laborers. Generally, flower plants will be having the harmful thorns which harms the flower plucking laborers while plucking the flowers. Using the BOT, we can reduce this risk and harmless. Manual harvesting of the flower is a laborious and exhausting job; it not only raises production costs, but also reduces the quality due to contaminations. Flowers quality could be enhanced if automated harvesting is substituted. As the main step towards designing a flowers harvester robot, an appropriate algorithm was developed in this study based on image processing techniques to recognize and locate flowers in the field Color features of the images in HSI and YCrCb colour spaces were used to detect the flowers. High pass filters were used to eliminate noise from the segmented images. Partial occlusion of flowers was modified using erosion and dilation operations. Separated flowers were then labelled. The proposed flower harvester was to pick flowers using a RG6 gripper.
Therefore, the center of the flower area was calculated by the algorithm as the location of the plant to be detected by the harvesting machine. Correct flower detection of the algorithm was measured using natural images comprising flowers, green leaves, weeds and background soil. The recognition algorithm’s accuracy to locate flowers was 96.4% and 98.7% when HSI and YCrCb colour spaces were used. Final decision-making subroutines utilize artificial neural networks (ANNs) to increase the recognition accuracy. A correct detection rate of 100% was achieved when the ANN approach was employed.
Like this entry?
-
About the Entrant
- Name:Pathmavasan Radhakrishnan
- Type of entry:teamTeam members:Pathmavasan R
Pradeep T R
Praveen N
Srija R - Software used for this entry:Auto CAD
- Patent status:none