
This proposal is about rethinking how we transport people and goods in the future.
The idea, herein called RailCat, is a modular rail-based system that allows a non-stop smooth transportation flow between any departure and destination locations within the system.
The RailCat concept is an alternative to the historic race for faster transport between centralized hubs. It's about how to provide an energy effective, flexible and distributed transport system that can match future environmental sustainability requirements.
SYSTEM
As a future physical system, RailCat is an autonomous system of wagons that is running on a gondola like track. Each wagon, hanging under a tube-shaped designed rail, acts as autonomous "vehicles" in the transport stream. They communicate with other wagons, the track switches and with the RailCat system itself. The idea is to mimic the flow of data packets in IT networks.
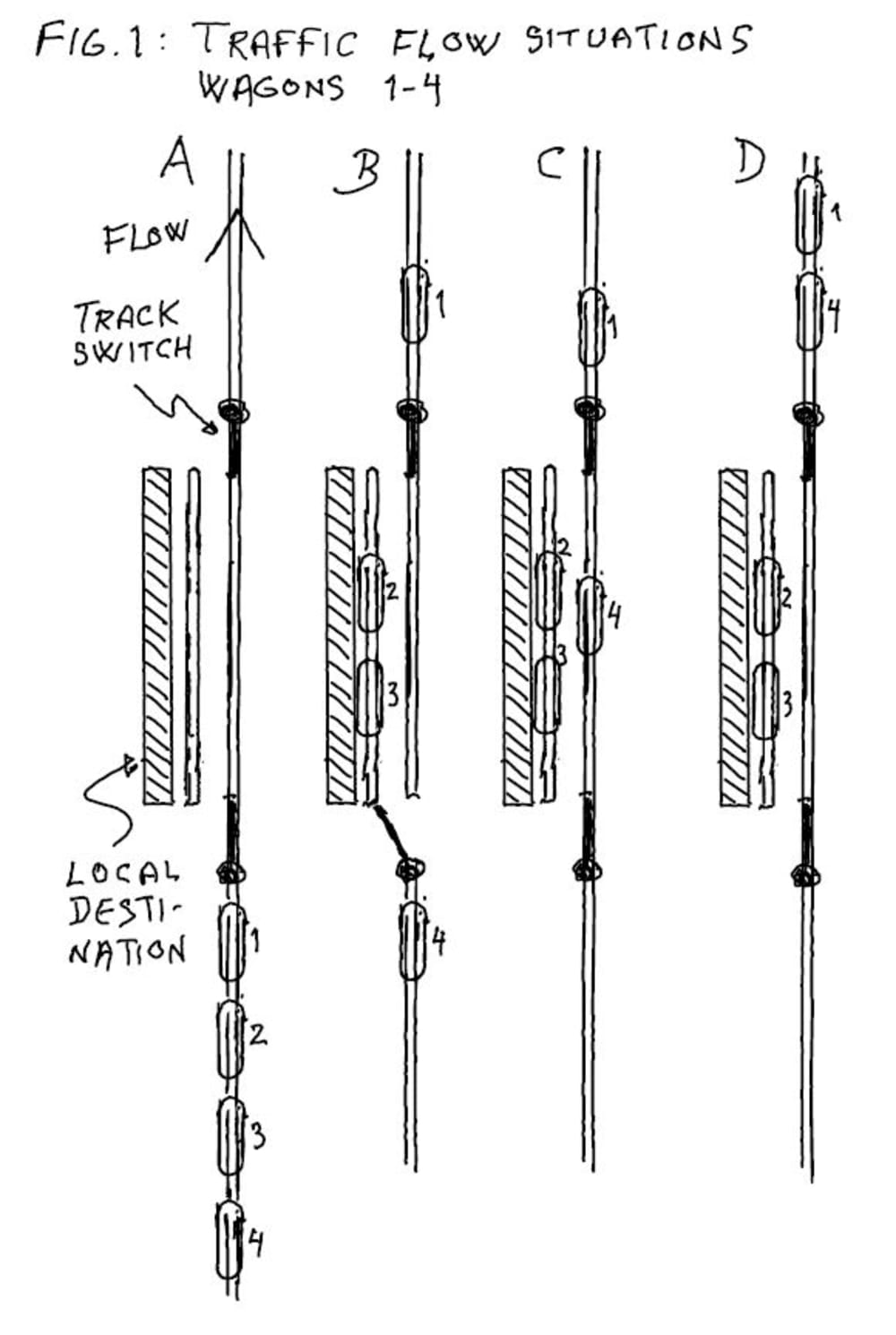
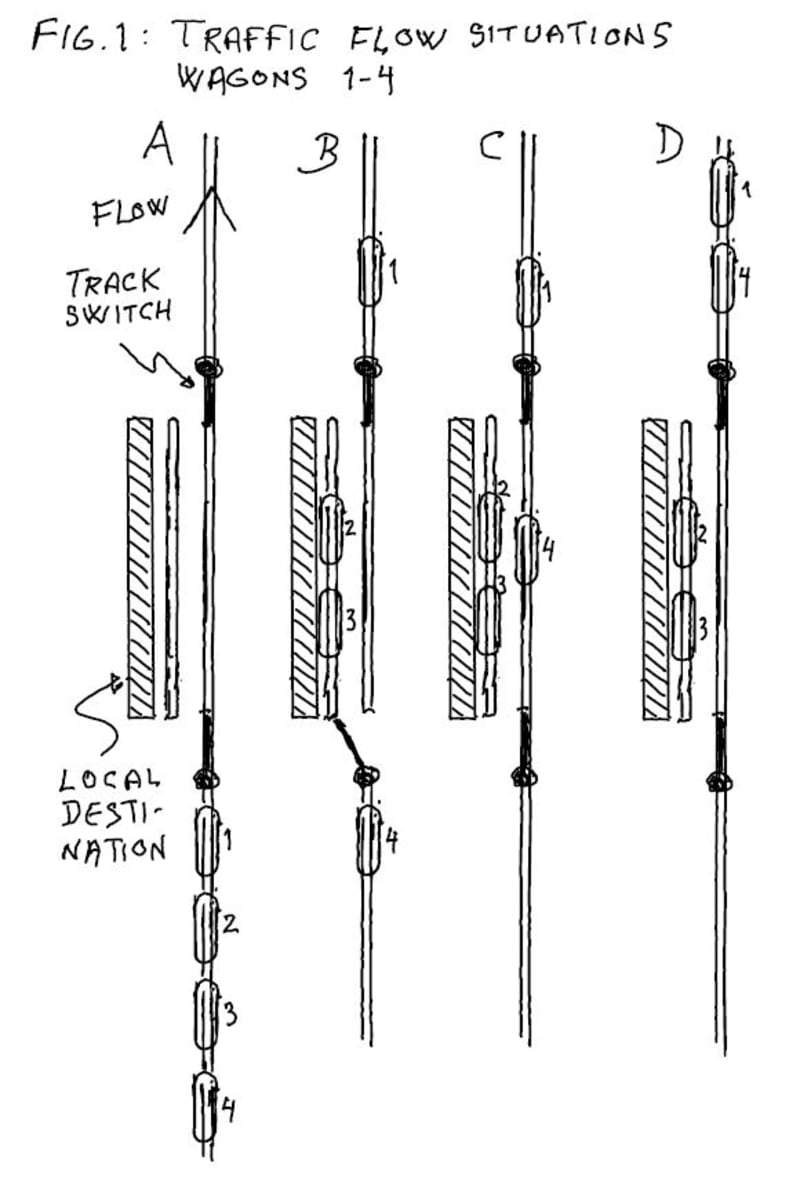
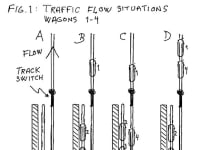
Attachment 1, “Fig.1 Traffic flow situations” outlines a simple transport scenario.
Example: as a passenger, you have entered the right wagon for your booked destination, in this case wagon 2 or 3. When these approaches the destination, they tell the other wagons to create a gap in the stream and notify the local track switch. This allows the rail system to temporarily off-track the specific wagon(s) to the desired station. Then, the system restores the "run through" track before the next wagon(s) arrive. This ensures a non-stop continuous voyage for all other wagons.
This basic transport example can be expanded to large networks.
MODULES
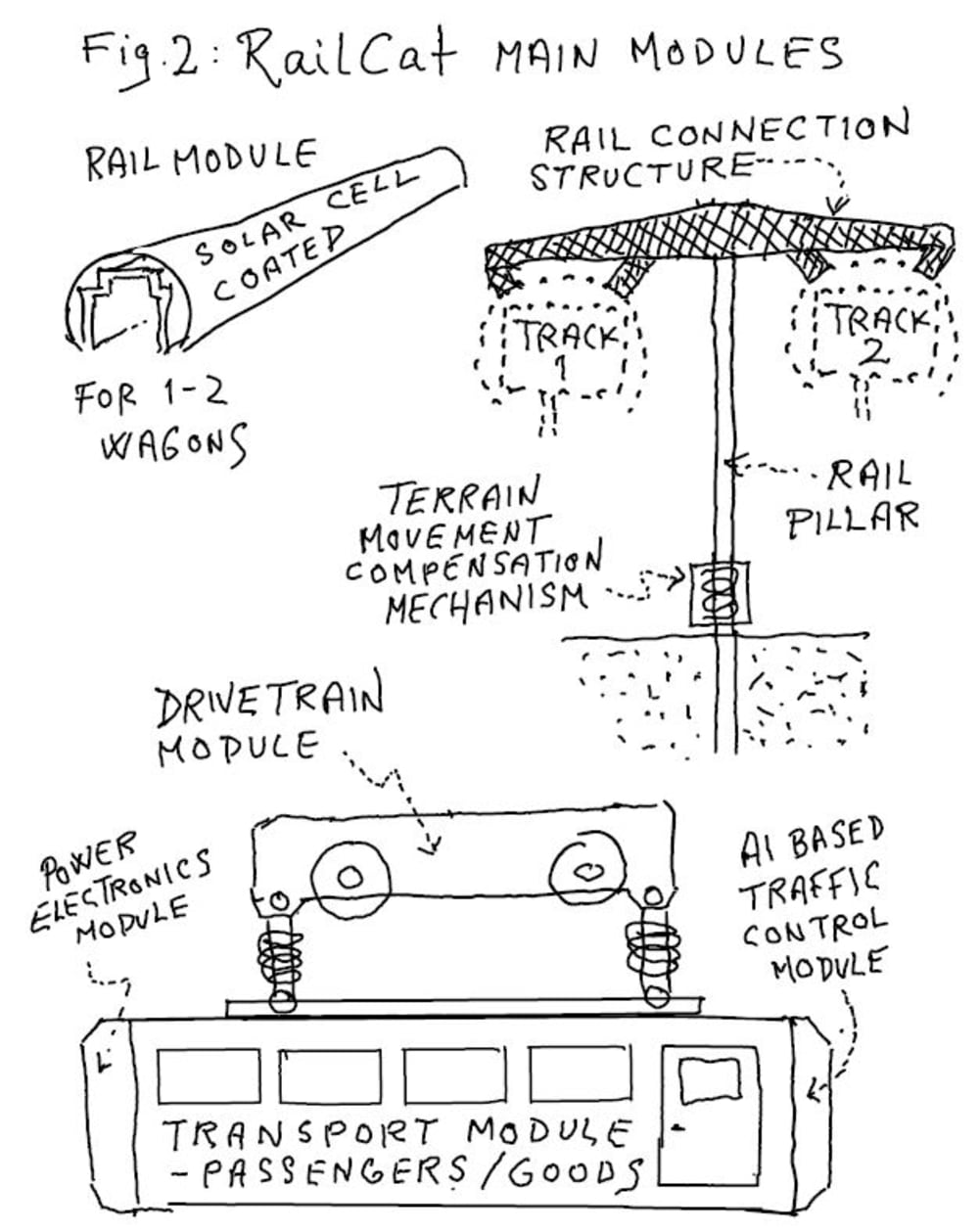
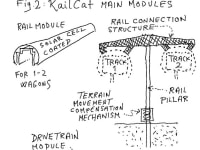
The RailCat concept is a modular system, as illustrated in Attachment 2, “Fig.2 RailCat main modules”.
The rail module is a lightweight metal alloy profile, designed for 1-2 wagons per module. It is covered by a semi-circle metal protecting tube which is coated with solar cell panels for power harvesting.
The rail support pillars hold the rail connecting structure, either one or two, dependent on the route’s track load. The pillars, drilled into the ground is equipped with adjustment mechanisms to keep the track straight, compensating for terrain movements, for example by long term tectonic displacements. Using pillars for the track ensure a minimal landscape footprint and is less vulnerable for flooding.
The RailCat drivetrain module provides propulsion and runs inside the rail module profile. Connection to the wagon module includes suspension and damping mechanisms to provide a comfortable transport for passengers and/or fragile goods.
The modular approach ensures an economic mass production possibility, maintainability and easy repair. Keeping module weight below 4,000 lbs allows helicopters to take the load.
RAIL MODULE
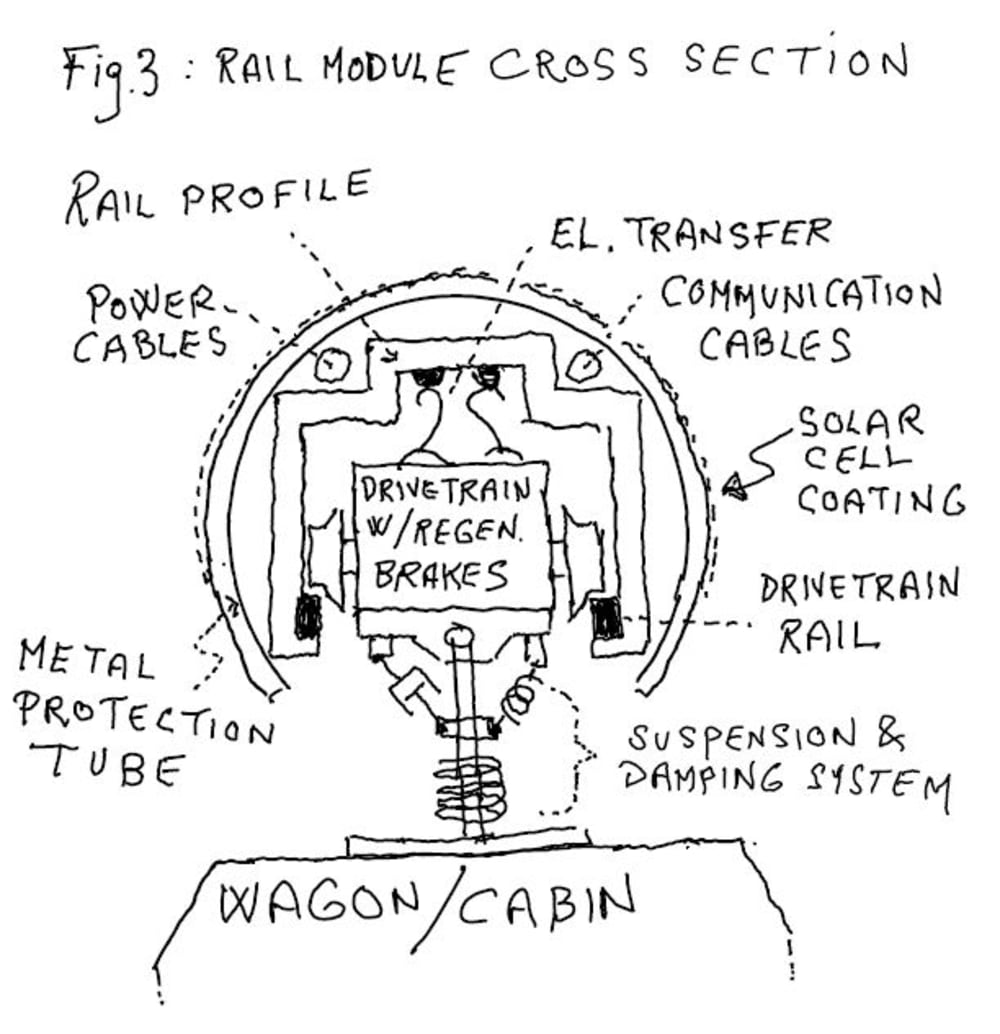
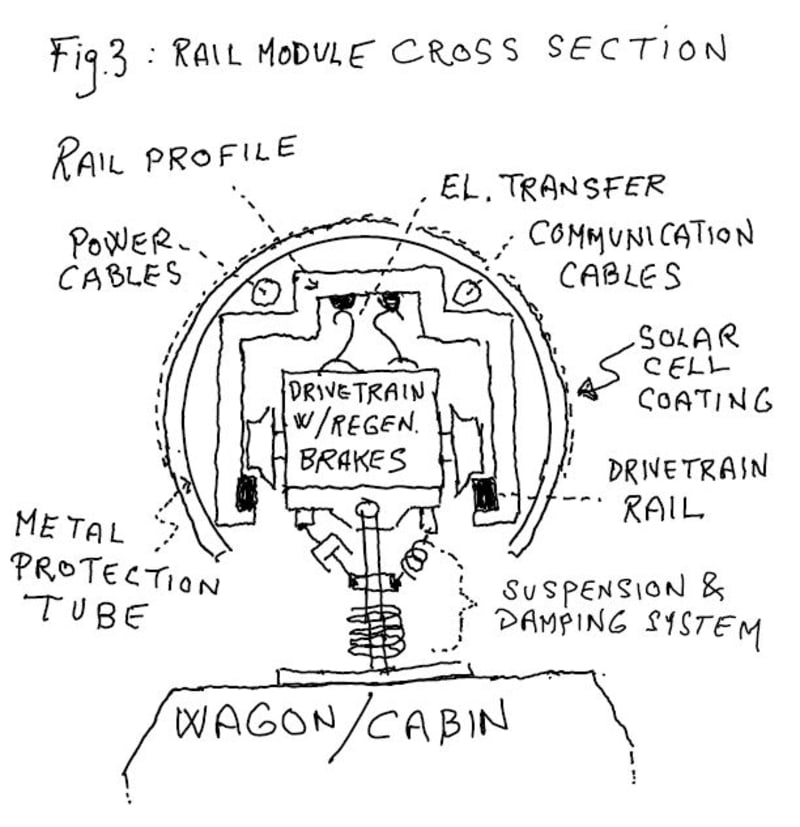
Attachment 3 “Fig.3 Rail module cross section” shows the rail tube interior, basically the drivetrain. It is equipped with regenerative brakes, to supply energy to other wagons that need power, climbing on other parts of the track.
Energy to/from the drivetrain is transferred via a pantograph inside the rail profile.
Communication and power cables are also placed inside the metal tube, protected from solar storms or other EMP disturbances.
__
We can build it, whether on Earth or on Mars!
Like this entry?
-
About the Entrant
- Name:Knut Olav Fjell
- Type of entry:individual
- Software used for this entry:"reMarkable" drawing board and MS Word (3dsMax will be used for follow up)
- Patent status:none