
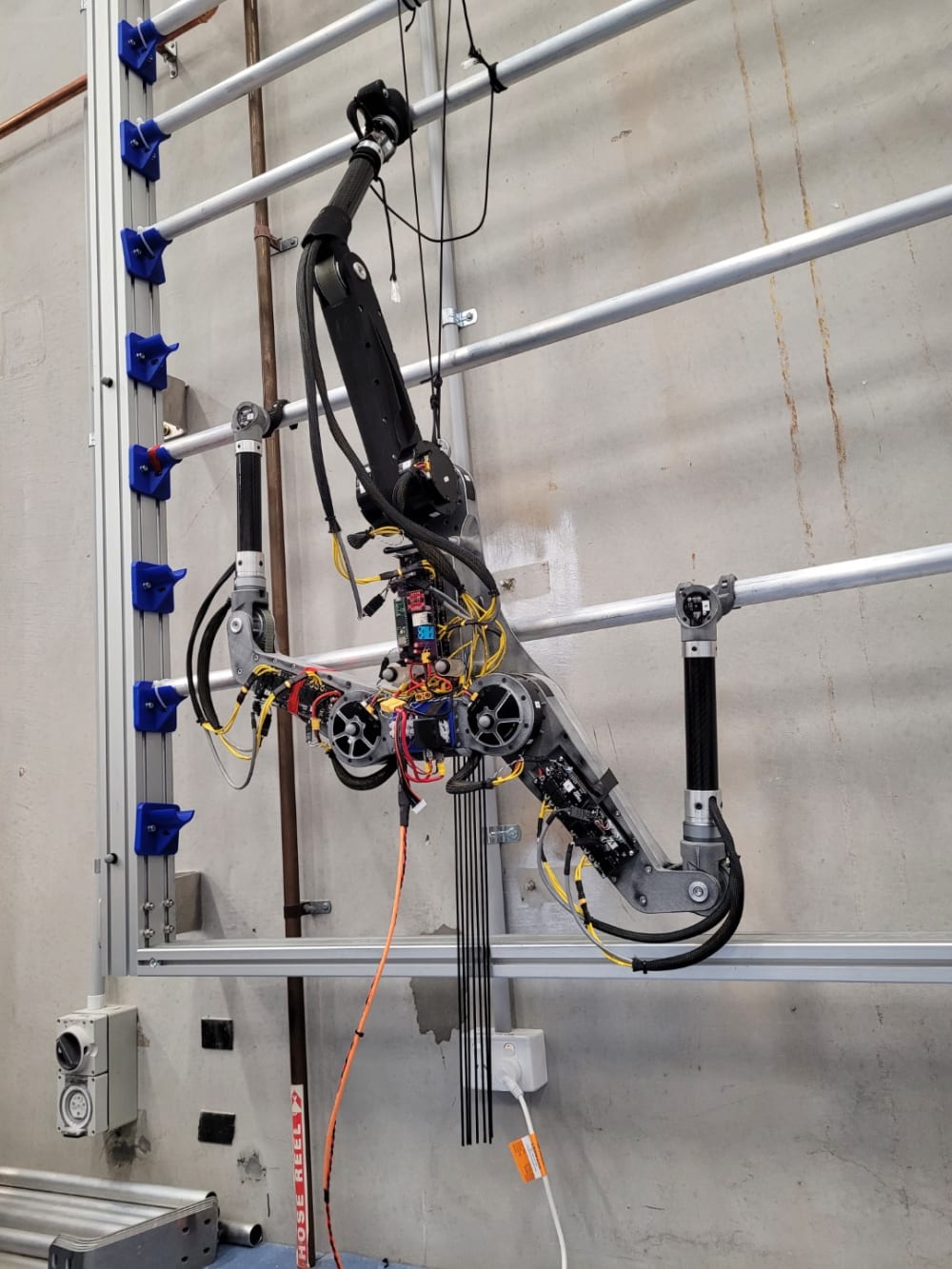









ParCli (PARrot CLImbing robot) is the world's first parrot-inspired climbing robot developed by Clyde Webster at the University of Technology Sydney. ParCli is unique in that, like a parrot, is uses three-limbs for locomotion, with the center-limb being larger, stronger, and having more dexterity, with the intention that in future revisions it will be used for mobile tool manipulation, like blasting, grinding, cutting, drilling, welding, and more. ParCli is being used as a research platform to validate the design philosophy, control methodologies, and planning algorithms necessary to create a work-capable climbing robot. It has 14 brushless DC motors, a 6800mAH battery, and is made of a combination of laser sintered nylon (a directed energy deposition technology), machined aluminum, fabricated steel, and carbon fibre. ParCli weighs roughly 10.5 kg, and in its most stretched out configuration (from beak to foot) has a length of 1.69m.
ParCli is the first in a line of robots being developed to allow legged robots to climb sparse vertical structures, like power transmission towers, telecommunications towers, construction scaffolding, and eventually in-space on structures like the International Space Station (ISS). Currently, a lot of dangerous and costly jobs are performed at heights with human labour. By developing a robotic platform that can climb in complex structures, we complete the set of locomotive capabilities legged robots need to be on par with humans, and can develop robots that can supplement human labour in dangerous environments. This not only reduces risk to life and limb, but also means the assets being maintained are less likely to need scheduled outages for maintenance programs. The future of ParCli is being developed by the startup Crest Robotics, who is currently residing at UTS Techlab in Sydney, Australia. Whilst initially focussing on more dangerous and high-value tasks, like high-voltage tower maintenance, our long term vision to provide an ultra-mobile platform that can be used for performing any tool based repetitive labour, breaking down stereotypes in labour heavy industries like construction, and increasing accessibility for all.
-
Awards
-
 2023 Robotics & Automation Honorable Mention
2023 Robotics & Automation Honorable Mention -
 2023 Top 100 Entries
2023 Top 100 Entries
Like this entry?
-
About the Entrant
- Name:Clyde Webster
- Type of entry:individual
- Software used for this entry:MATLAB, Simulink
- Patent status:none