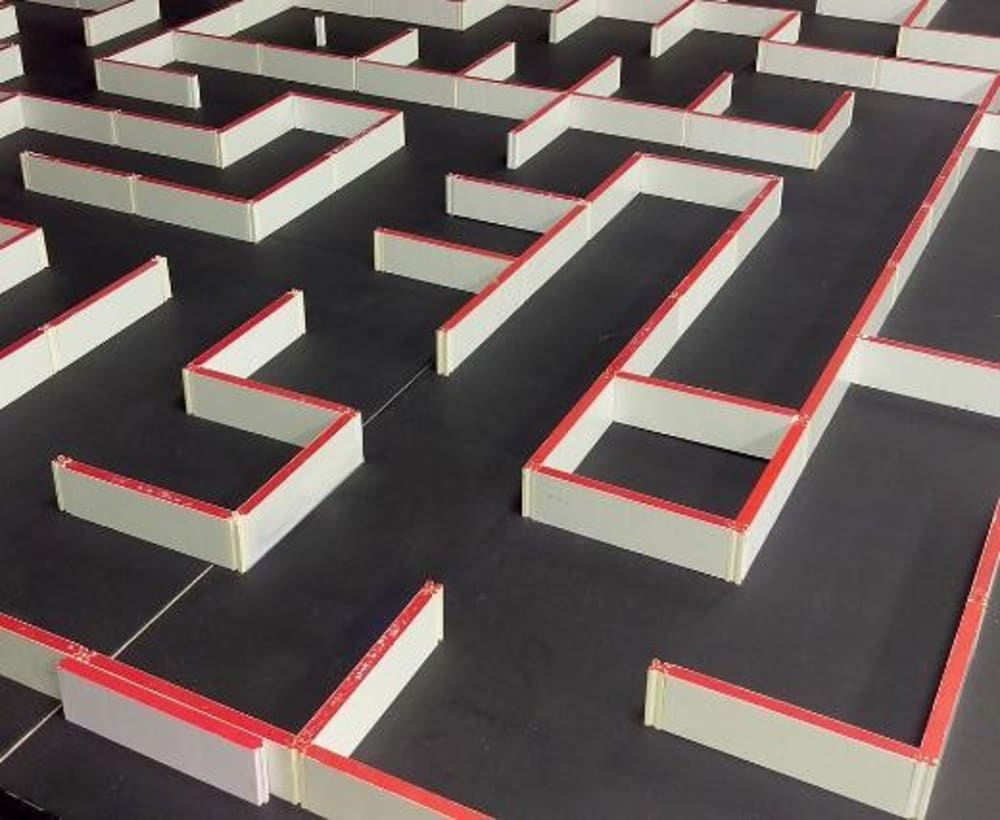

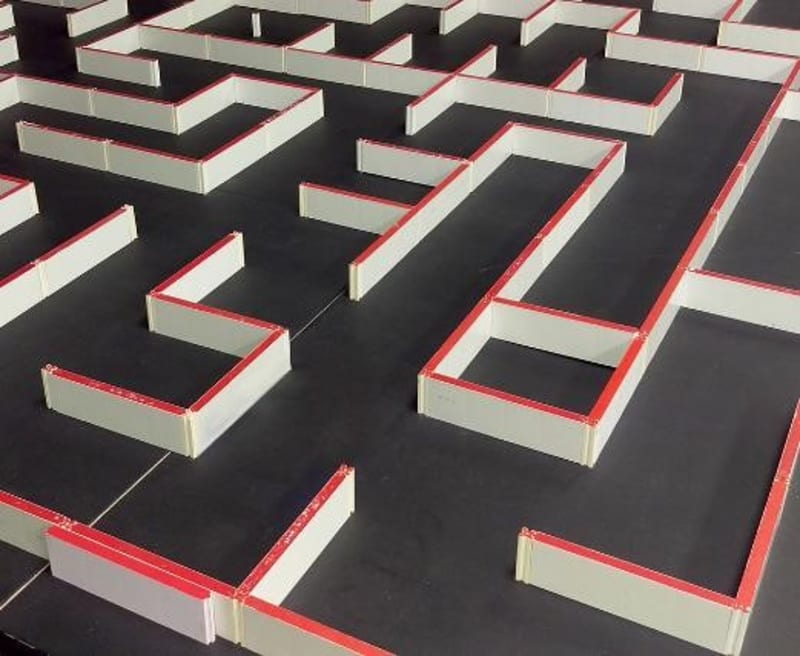



Micromouse is a wheeled robot that solves the unknown maze. The mouse must keep track of its location, find walls as it explores, map out the maze, and recognize when it has arrived at the desired destination. Micromouse can automatically memorize maze data, choose the shortest way, and then accelerate to the predetermined destination. The main scope of this project is to build an STM32 microcontroller-based autonomous maze solver micro mouse. Micromouse is made of STM32F103C8T6, DVR8835 Motor Driver, N20 Motors, VL53L0X TOF Distance Ranging Sensor. We had interfaced STM32 with five TOF Sensors, DVR8835 Motor driver and two motors. The main principle of the micro mouse is to solve the maze and find its destination as soon as possible. PID and Flood Fill algorithm is used in this mouse. Single Layer-Printed Circuit Board (PCB) micromouse is designed. It is fabricated and assembled at an in-house facility. The dimension of the micromouse is about 80 mm x 60 mm.
Introduction:
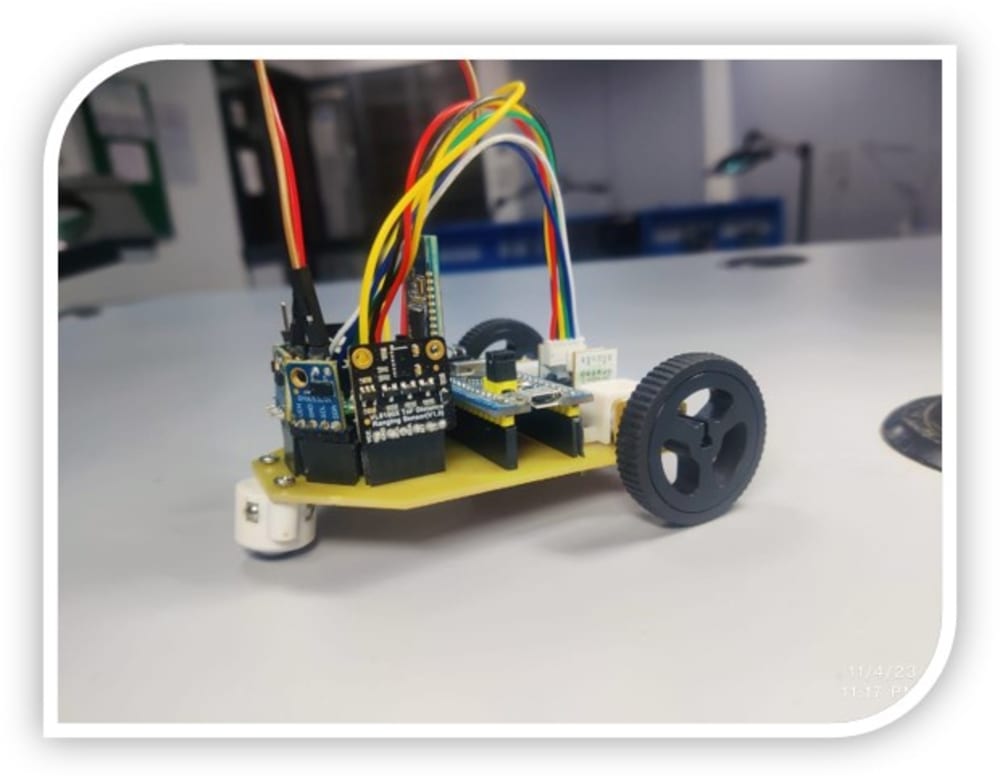
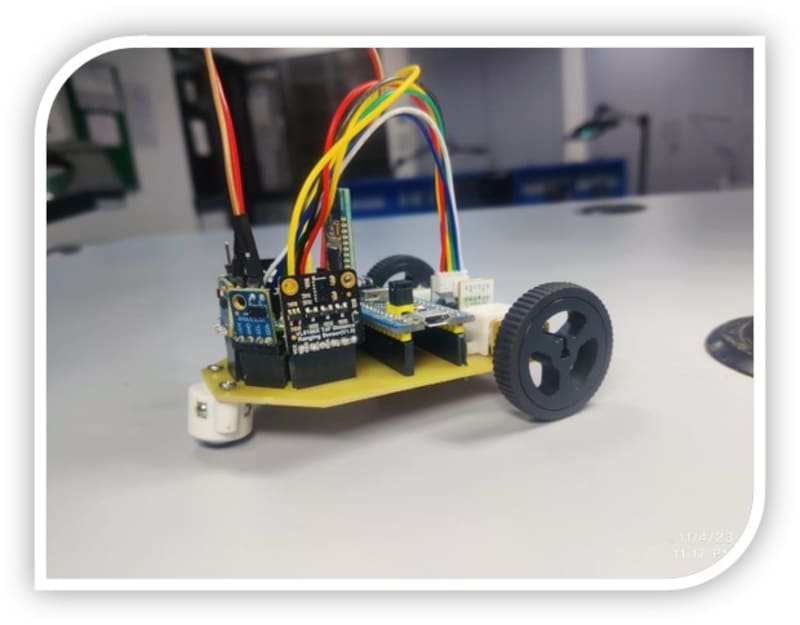
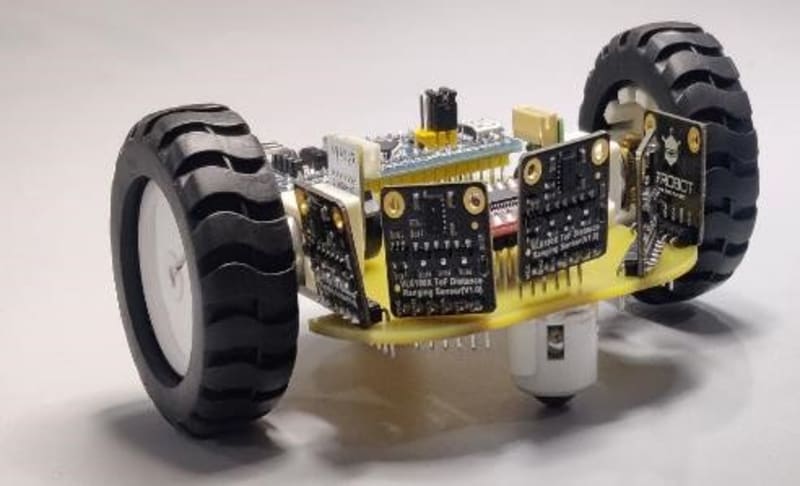
The autonomous maze-solving micromouse project represents a sophisticated integration of hardware and algorithms, centered around an STM32F103C8T6 microcontroller. This compact micromouse, measuring 80 mm x 60 mm, aims to efficiently navigate an unknown maze using a combination of advanced technologies. The key components include N20 Motors controlled by a DVR8835 Motor Driver, ensuring precise and controlled movement. To perceive its surroundings, the micromouse incorporates five VL53L0X TOF Distance Ranging Sensors, enabling accurate distance measurements for effective maze navigation.
The intelligence of the micromouse is enhanced through the implementation of PID and Flood Fill algorithms. The PID algorithm facilitates precise motor control, maintaining straight paths and adjusting speed based on sensor feedback. Simultaneously, the Flood Fill algorithm is instrumental in maze exploration and mapping, aiding the micromouse in efficiently finding the shortest path to its destination. The project also features a custom-designed Single Layer Printed Circuit Board (PCB) for streamlined integration and reduced risk of connectivity issues. Overall, this micromouse project showcases a holistic approach to autonomous robotics, combining hardware design and intelligent algorithms to create an agile and efficient maze solving robot.
Design:
The design of the autonomous maze solver micromouse is a comprehensive integration of hardware components and algorithmic frameworks. Our model leverages the robust STM32 microcontroller, TOF distance ranging sensors, PID control, and the Flood Fill algorithm to navigate unknown mazes accurately. The primary design objectives include compactness, efficiency, and seamless interaction between the microcontroller and peripherals.
Methodology
HARDWARE INTEGRATION
The methodology for implementing the autonomous maze solver micromouse begins with the seamless integration of hardware components. The STM32 microcontroller serves as the central hub, connecting and orchestrating the functionalities of the TOF distance ranging sensors and motor drivers. This integration is paramount for establishing a robust communication framework, enabling real-time data exchange between sensors and actuators.
ALGORITHM IMPLEMENTATION
The core of the micromouse's intelligence lies in the implementation of sophisticated algorithms. The project employs the Proportional-Integral-Derivative (PID) control for motor precision, ensuring the micromouse moves with accuracy and responsiveness.
Video
Like this entry?
-
About the Entrant
- Name:Mohamed Uvaise A
- Type of entry:teamTeam members:
- MOHAMED UVAISE A
- INDHUJA T
- JANARTHANAN S
- GAYATHRI M
- Patent status:pending